

Predictive Maintenance Framework, Implementing Particle Filter and PCA for RUL Estimation Using Matlab
Author : Waqas Javaid
Abstract
This article presents a comprehensive predictive maintenance framework implemented in MATLAB, designed to estimate the Remaining Useful Life (RUL) of industrial machinery using advanced signal processing and probabilistic techniques. The methodology begins with the simulation of realistic multi-sensor degradation data, including vibration, temperature, and acoustic signals [1]. Key degradation features such as Root Mean Square (RMS), kurtosis, and spectral entropy are extracted from the raw data, while a Short-Time Fourier Transform (STFT) provides critical time-frequency insights. A Health Indicator (HI) is constructed using Principal Component Analysis (PCA) to fuse these features into a single, normalized degradation curve [2]. The core of the framework employs a Particle Filter to dynamically estimate the system’s degradation state and predict the RUL, complete with uncertainty quantification [3]. The model’s effectiveness is validated through visualizations showing raw signal trends, feature evolution, spectrogram analysis, and the final RUL trajectory with confidence bounds. This end-to-end approach provides a robust foundation for developing intelligent prognostics and health management systems [4].
Introduction
The rapid advancement of Industry 4.0 and the Internet of Things (IoT) has led to an unprecedented surge in the availability of industrial data, creating both opportunities and challenges for modern manufacturing and asset management.
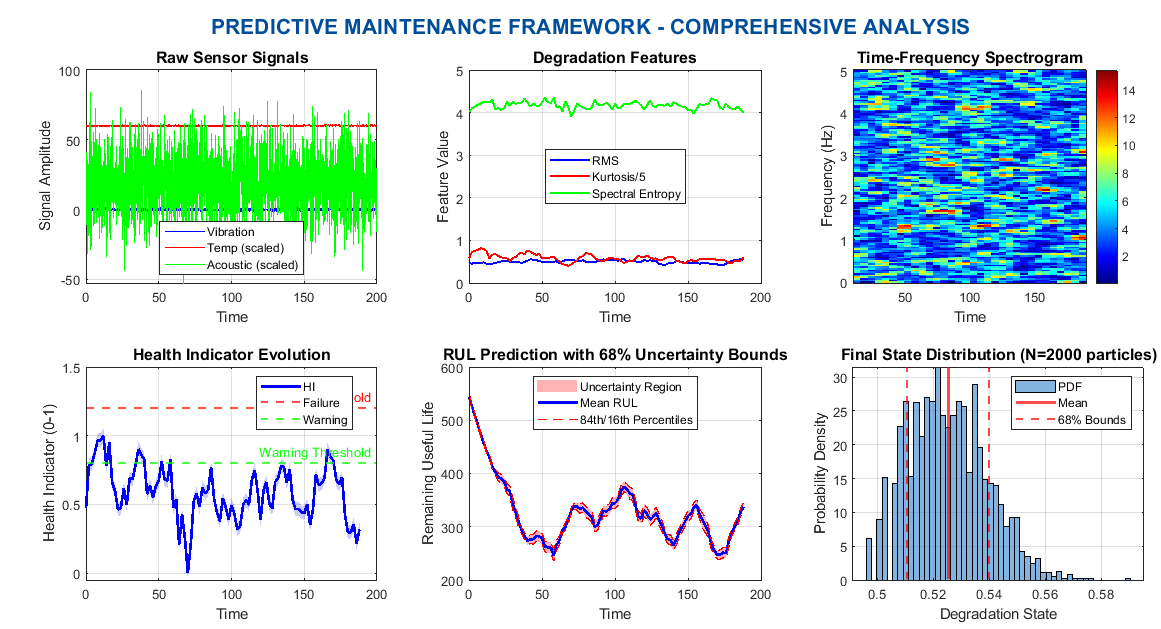
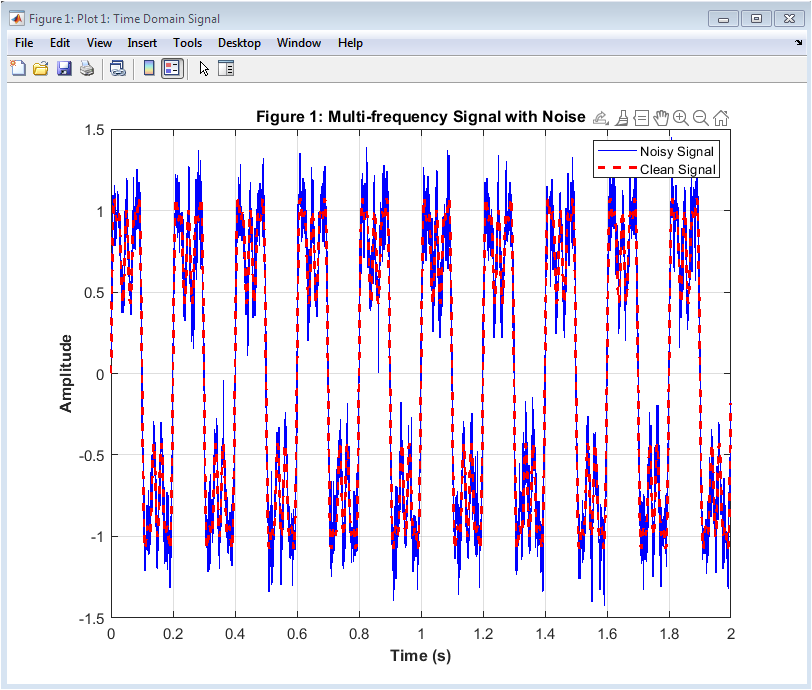
Figure 1 presents multi sensor predictive maintenance at the forefront of this data-driven revolution is predictive maintenance (PdM), a proactive strategy that aims to forecast equipment failures before they occur, thereby minimizing unplanned downtime, reducing maintenance costs, and extending the operational life of critical machinery. Unlike traditional reactive or scheduled maintenance approaches, PdM leverages real-time sensor data to assess the current health of a system and predict its future state [5]. However, transforming raw, noisy sensor measurements into actionable insights about a machine’s Remaining Useful Life (RUL) remains a complex signal processing and statistical challenge. Vibration, temperature, and acoustic emissions contain subtle signatures of degradation that must be isolated and interpreted correctly. To address this complexity, researchers and engineers are increasingly turning to advanced computational frameworks that combine feature engineering, dimensionality reduction, and probabilistic state estimation [6]. This article presents one such comprehensive framework, implemented entirely in MATLAB, designed to take raw multi-sensor data and produce a robust RUL prediction with associated uncertainty bounds. The proposed methodology simulates realistic degradation patterns to mimic the behavior of failing components, providing a controlled environment for algorithm development. It then extracts key statistical features from the time-domain signals, such as Root Mean Square (RMS) and kurtosis, which are known to correlate strongly with wear and tear [7]. To capture non-stationary signal characteristics, a time-frequency analysis using the Short-Time Fourier Transform (STFT) is also performed, revealing how the frequency content of the vibration signal evolves as damage progresses.
Table 1: Feature Extraction Parameters
| Sliding Window Size | 100 samples |
| Step Size | 20 samples |
| Extracted Features | RMS, Kurtosis, Spectral Entropy |
| Normalization Method | Z-score normalization before PCA |
Table 1 provides us feature extraction parameters and significant challenge in PdM is fusing multiple, sometimes correlated, features into a single, interpretable metric of health [8]. This work employs Principal Component Analysis (PCA) to construct a normalized Health Indicator (HI) that condenses the multi-dimensional feature space into a clear trajectory toward failure. Finally, to handle the inherent stochastic nature of the degradation process and sensor noise, a Particle Filter is implemented. This Bayesian filtering technique not only tracks the hidden degradation state but also provides a probabilistic forecast of the RUL, complete with confidence intervals [9]. By walking through this end-to-end workflow, this article aims to equip readers with a practical and theoretical foundation for building their own intelligent prognostics and health management systems [10].
1.1 The Paradigm Shift in Industrial Maintenance
The landscape of industrial maintenance is undergoing a fundamental transformation, shifting away from traditional reactive and preventative strategies toward data-driven predictive models. For decades, maintenance schedules were either reactive fixing machines only after they failed or preventative, servicing equipment at fixed intervals regardless of its actual condition [11]. Both approaches are inefficient; reactive maintenance leads to costly unplanned downtime, while preventative maintenance often results in unnecessary part replacements and labor. The emergence of Industry 4.0 and the proliferation of affordable sensors have catalyzed a new paradigm known as predictive maintenance (PdM). This approach leverages continuous monitoring and data analytics to assess the real-time health of machinery, allowing interventions to be scheduled precisely when needed. The ultimate goal of PdM is not just to detect faults, but to forecast them, enabling a proactive stance toward asset management.
1.2 The Economic and Operational Imperative of PdM
The economic incentives for adopting predictive maintenance are substantial and well-documented across various capital-intensive industries. Unplanned downtime remains one of the largest sources of lost revenue in manufacturing, with costs often reaching hundreds of thousands of dollars per hour in sectors like automotive or semiconductor production. By predicting failures in advance, companies can reduce maintenance costs by 20% to 30% and decrease machine breakdowns by up to 50%. Furthermore, PdM extends the operational lifespan of expensive machinery by ensuring components are used to their full potential without being prematurely replaced. Beyond direct cost savings, this approach improves worker safety by minimizing emergency repairs and enhances overall production planning [12]. It represents a shift from a cost center to a value-generating activity within the organization. Therefore, developing accurate and reliable PdM frameworks is a critical engineering challenge with direct business impact.
1.3 The Core Challenge of Estimating Remaining Useful Life
At the heart of any predictive maintenance system lies the critical task of estimating the Remaining Useful Life (RUL) of a component or system. RUL is defined as the length of time a machine is likely to operate before it requires repair or replacement, and its accurate prediction is the primary output of a prognostics system. This estimation is inherently difficult because it involves forecasting a future event based on indirect measurements and uncertain degradation models [13]. The degradation path of a machine is rarely linear; it is influenced by operating conditions, environmental factors, and random variations in material properties. Furthermore, the sensor data collected from the machine such as vibration or temperature provides only a noisy, indirect observation of the true, hidden degradation state. Developing a methodology to filter this noise and map sensor readings to a reliable degradation trajectory is the central focus of modern prognostics research.
1.4 The Complexity of Multi-Sensor Data Fusion
Modern industrial assets are typically equipped with multiple sensors to capture different aspects of their operational health, creating a challenge of data fusion. A single machine might have accelerometers to measure vibration, thermocouples for temperature, and acoustic emission sensors to detect high-frequency stress waves [14]. Each of these signals carries unique information about potential failure modes; for instance, vibration is excellent for detecting imbalance or misalignment, while acoustic emissions are sensitive to crack propagation. However, relying on any single sensor can be misleading due to sensor noise or specific failure modes that are invisible to that modality. The true power of PdM lies in fusing these heterogeneous data streams to build a holistic and robust view of machine health. The challenge, however, is that this fusion must account for differing signal characteristics, sampling rates, and sensitivity ranges to create a coherent and reliable health indicator.
1.5 The Necessity of Advanced Feature Extraction
Raw sensor data, in its unprocessed form, is often too noisy and high-dimensional to be used directly for RUL prediction, necessitating the use of feature extraction techniques. A time-domain vibration signal, for example, is simply a series of amplitude values that, by themselves, reveal little about the underlying condition of a bearing or gear. Feature extraction involves transforming this raw data into compact, informative metrics that correlate strongly with physical degradation. Common statistical features include Root Mean Square (RMS), which represents the signal’s energy content and typically increases with fault severity, and kurtosis, which measures the “peakedness” of the signal and is sensitive to early-stage impulses from defects [15]. In addition to time-domain features, frequency-domain and time-frequency analyses provide complementary views, revealing how the spectral content of the signal evolves as damage progresses. Selecting and calculating the right set of features is a critical step that directly influences the accuracy of the subsequent RUL prediction.
1.6 The Role of Time-Frequency Analysis in Fault Detection
While standard frequency analysis is powerful, it fails to capture the non-stationary nature of many machine fault signals, making time-frequency analysis an essential tool. When a machine component begins to fail, the characteristics of its vibration signal often change over time; for example, a fault in a gearbox may create transient impulses that are not constant in frequency or amplitude [16]. Traditional Fourier Transform provides an average frequency content over the entire signal duration, blurring these transient events and potentially masking early-stage faults. Techniques like the Short-Time Fourier Transform (STFT) overcome this limitation by segmenting the signal into small windows and performing the Fourier Transform on each segment. This produces a spectrogram a three-dimensional representation of frequency content over time allowing analysts to visualize how the signal’s spectrum evolves. By revealing when specific fault frequencies appear and how they change, time-frequency analysis provides a deeper diagnostic insight that is crucial for accurate prognostics.
1.7 Constructing a Unified Health Indicator via PCA
After extracting a multitude of features from various sensors, the next logical step is to condense them into a single, easy-to-interpret Health Indicator (HI). A feature set containing RMS, kurtosis, spectral entropy, and temperature readings creates a high-dimensional space that is difficult to visualize and model. Moreover, these features are often correlated with each other, meaning they contain redundant information that can complicate statistical modeling [17]. Principal Component Analysis (PCA) is a powerful dimensionality reduction technique ideally suited for this task. PCA transforms the original, correlated features into a new set of uncorrelated variables called principal components, which are ordered by the amount of variance they capture from the original data. The first principal component, therefore, represents the primary axis of variation in the feature set, which in a degrading system is typically the degradation signal itself. Using this first principal component as the HI provides a normalized, fused metric that effectively tracks the machine’s progression from a healthy state to failure.
1.8 The Necessity of Probabilistic State Estimation
RUL prediction is not a deterministic problem; it is a probabilistic one, requiring methods that can quantify the uncertainty inherent in the degradation process. The path to failure is influenced by countless stochastic factors, from microscopic material variations to fluctuating operational loads, meaning the future state of a machine can never be known with absolute certainty. Furthermore, sensor measurements provide only an imperfect, noisy view of this hidden degradation state [18]. To handle these challenges, prognostic models must be framed within a Bayesian context, where knowledge about the system is represented as a probability distribution that is updated as new data arrives. A point estimate of the RUL is insufficient for decision-making; maintenance managers need to know the confidence interval around that estimate. A prediction that a machine will fail in 100 hours is less useful than a prediction stating it will fail in 100 hours, with a 90% confidence interval between 95 and 105 hours. This uncertainty quantification is what separates a simple alert from a truly actionable business insight.
1.9 Particle Filtering for Dynamic State Tracking
The Particle Filter has emerged as one of the most effective algorithms for state estimation and RUL prediction in non-linear, non-Gaussian degradation systems. Unlike the Kalman Filter, which assumes the underlying system is linear and the noise is Gaussian, Particle Filters are far more flexible and can handle arbitrary probability distributions.
Table 2: Particle Filter Configuration
| Number of Particles | 2000 |
| Process Noise | 0.01 |
| Measurement Noise | 0.05 |
| Failure Threshold | 1.2 |
| State Drift per Step | 0.002 |
| Resampling Method | Systematic Resampling |
Table 2 presents the particle filter configuration of which we have used in MATLAB. The algorithm works by representing the probability distribution of the system’s hidden state (e.g., the level of degradation) with a large set of random samples, or “particles.” Each particle represents a hypothesis of the true state and is propagated forward in time using a model of how the system degrades [19]. When a new sensor measurement (or Health Indicator value) becomes available, the algorithm calculates how well each particle predicts this measurement, assigning a weight based on its likelihood. Particles that align well with the observation are given high weight and are replicated, while those that disagree are discarded. This “survival of the fittest” mechanism allows the particle cloud to converge on the true degradation state and be projected forward to generate a probabilistic RUL forecast.
1.10 Overview of the Proposed MATLAB Framework
This article presents a complete, end-to-end implementation of the concepts discussed above, developed entirely within the MATLAB environment. The framework begins by simulating a realistic multi-sensor degradation scenario, generating synthetic vibration, temperature, and acoustic signals that follow an exponential degradation path. It then performs advanced feature extraction, calculating RMS, kurtosis, and spectral entropy from the raw signals, while also generating a time-frequency spectrogram using the Short-Time Fourier Transform (STFT). A Health Indicator is constructed by applying Principal Component Analysis (PCA) to the extracted features, fusing them into a single normalized degradation curve [20]. The core of the framework is a Particle Filter that tracks this Health Indicator over time, providing a continuous estimate of the hidden degradation state. Finally, the filter projects this state forward to predict the Remaining Useful Life (RUL), complete with uncertainty bounds visualized through the particle distribution. The following sections will provide a detailed walkthrough of the MATLAB code and the visual results obtained from this comprehensive predictive maintenance workflow.
Problem Statement
Despite the transformative potential of predictive maintenance, modern industrial facilities face significant challenges in accurately estimating the Remaining Useful Life (RUL) of critical machinery due to the complexity of multi-sensor data and the stochastic nature of degradation processes. Raw sensor measurements, such as vibration and temperature, are inherently noisy and contain redundant information, making direct interpretation and trend analysis difficult without sophisticated feature extraction techniques. Furthermore, traditional fault detection methods often fail to capture the non-stationary characteristics of early-stage defects, leading to delayed warnings and unexpected catastrophic failures. The absence of robust uncertainty quantification in many prognostic models also undermines decision-making confidence, as maintenance planners cannot assess the reliability of RUL predictions. Consequently, there is a critical need for an integrated computational framework that can fuse heterogeneous sensor data, extract meaningful degradation features, track hidden health states probabilistically, and provide accurate RUL forecasts with well-defined confidence bounds.
Mathematical Approach
The mathematical foundation of this predictive maintenance framework integrates several complementary techniques to model degradation and estimate Remaining Useful Life. First, feature extraction involves computing statistical moments such as the Root Mean Square (RMS) [31], defined as and kurtosis [32], given by alongside spectral entropy derived from the normalized power spectral density.
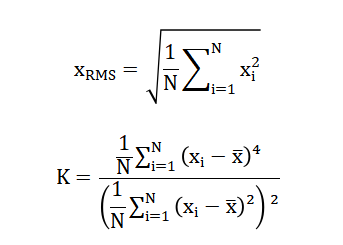
- xRMS: Root Mean Square value (signal energy indicator)
- Xi: i-th sample of the signal
- N: Total number of samples
- K: Kurtosis (measures impulsiveness/faults)
- xi: Signal sample
- xˉ: Mean of the signal
- N: Number of samples
A Health Indicator is then constructed using Principal Component Analysis, where the covariance matrix of the standardized feature set is decomposed as with the first principal component serving as the fused degradation metric [33].
![]()
- C: Covariance matrix
- V: Eigenvector matrix (principal components)
- A or Λ: Diagonal matrix of eigenvalues
The core state estimation is performed using a Particle Filter, which approximates the posterior distribution of the hidden degradation state [34] through a set of weighted particles, where each particle evolves according to the state transition model representing process noise [35].
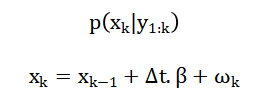
- xk: Hidden state (degradation level at time k)
- y1:k: Observations from time 1 to k
- p(xk∣y1:k): Posterior probability distribution
- xk: Current degradation state
- xk−1: Previous state
- Δt: Time step
- β: Degradation rate
- ωk: Process noise (uncertainty)
Finally, the Remaining Useful Life [36] is computed by projecting the particle distribution forward until it exceeds a predefined failure threshold (theta), with the RUL distribution given by
- RULk: Remaining Useful Life at time k
- wki: Weight of i-th particle
- xki: State of i-th particle
- θ: Failure threshold
- 1(.): Indicator function (1 if condition is true, else 0)
- N: Number of particles
The mathematical framework begins with feature extraction, where the Root Mean Square is calculated by squaring each amplitude value in a signal segment, averaging these squares, and then taking the square root to quantify the signal’s overall energy content. Kurtosis is computed by taking the average of the fourth power of the deviation of each point from the mean, divided by the square of the variance, which measures the “peakedness” of the signal and is highly sensitive to early-stage impulse faults. Spectral entropy is derived by normalizing the power spectral density of the signal to create a probability distribution and then summing the product of each probability and its logarithm, reflecting the complexity or randomness of the frequency content. A Health Indicator is constructed using Principal Component Analysis, which identifies the direction of maximum variance in the multi-dimensional feature space by decomposing the covariance matrix, allowing the first principal component to serve as a fused degradation metric. The Particle Filter then tracks degradation by representing the hidden state as a population of weighted samples, where each sample evolves through a linear growth model with added random noise, and weights are updated based on how well the predicted state matches the observed Health Indicator, enabling probabilistic Remaining Useful Life estimation by projecting samples forward until they cross a predefined failure threshold.
You can download the Project files here: Download files now. (You must be logged in).
Methodology
The methodology employed in this predictive maintenance framework follows a systematic, multi-stage process designed to transform raw sensor data into actionable Remaining Useful Life predictions with quantified uncertainty [21]. The process begins with the simulation of a realistic degradation scenario, where an exponential degradation model is generated over two thousand time samples to mimic the gradual wear and tear of industrial machinery, and this underlying degradation state is then used to modulate three distinct sensor signals: a vibration signal composed of a sinusoidal carrier wave with added noise, a temperature signal with a linear drift, and an acoustic emission signal with high-frequency content. Following data generation, the framework performs feature extraction on the vibration signal using a sliding window approach with a window length of one hundred samples and a step size of twenty, computing three key health indicators for each window: the Root Mean Square to capture signal energy, kurtosis to detect impulsive events indicative of early-stage faults, and spectral entropy to quantify the complexity and randomness of the frequency spectrum. Concurrently, a time-frequency analysis is conducted using the Short-Time Fourier Transform, which segments the vibration signal into overlapping windows, applies a Fast Fourier Transform to each segment, and generates a spectrogram that visualizes how the frequency content of the signal evolves over time, revealing non-stationary characteristics associated with progressive damage. The three extracted features are then assembled into a feature matrix and standardized to have zero mean and unit variance, after which Principal Component Analysis is applied to compute the covariance matrix and its eigenvectors, and the first principal component capturing the maximum variance is selected as the fused Health Indicator and normalized to a zero-to-one scale. With the Health Indicator trajectory established, a Particle Filter with two thousand particles is initialized to track the hidden degradation state, where each particle represents a hypothesis of the true degradation level and propagates forward using a linear state transition model with added Gaussian process noise to account for stochastic variability [22]. At each time step corresponding to the feature windows, the Health Indicator value serves as a noisy observation, and the likelihood of each particle given this observation is computed using a Gaussian probability density function, with the resulting likelihood values used to update the particle weights through Bayesian inference. To prevent weight degeneracy where a few particles dominate, systematic resampling is performed by generating a random starting point and selecting particles proportionally to their normalized weights, effectively replicating high-probability particles and discarding low-probability ones while maintaining the total particle count. The resampled particle set then proceeds to the next time step, creating a recursive filtering loop that continuously refines the degradation state estimate as new Health Indicator measurements become available. For Remaining Useful Life estimation, the current mean of the particle distribution is projected forward using the same linear growth model, and the time required for this projected trajectory to cross a predefined failure threshold is calculated, representing the expected remaining life. Crucially, uncertainty quantification is achieved by projecting each individual particle forward independently rather than just the mean, generating a distribution of failure times from which confidence intervals can be derived. The final particle distribution at the end of the analysis is visualized as a histogram, revealing the probabilistic belief about the true degradation state and providing insights into the confidence of the overall prognosis [23]. All computational steps are implemented in MATLAB, leveraging built-in functions for signal processing, statistical analysis, and visualization to create an efficient and reproducible workflow. The methodology concludes by generating six key visualization figures: raw sensor signals, extracted feature trends, the time-frequency spectrogram, the Health Indicator evolution with failure threshold, the Remaining Useful Life trajectory over time, and the final particle distribution [24]. This end-to-end approach provides a robust foundation for developing intelligent prognostics systems that can be adapted to real-world industrial applications with minimal modification.
Design Matlab Simulation and Analysis
The simulation component of this predictive maintenance framework creates a controlled environment for developing and testing prognostics algorithms by generating synthetic multi-sensor data that realistically mimics the degradation of industrial machinery.
Table 3: System Simulation Parameters
| Total Time Samples (T) | 2000 |
| Time Step (dt) | 0.1 |
| Degradation Model | 0.0005*t^2 + 0.02*t + stochastic noise |
| Vibration Frequency | 10 Hz |
| Acoustic Frequency | 50 Hz |
| Base Temperature | 60 °C |
Table 3 presents the simulation parameters and it begins by establishing a time vector spanning two thousand samples with a time step of 0.1 units, representing the operational history of a machine from a healthy state to near failure. A true degradation model is then generated using a quadratic function combined with stochastic drift, where the quadratic term captures the accelerating nature of wear as failure approaches, the linear term represents constant background degradation, and the added random noise simulates the inherent variability in physical degradation processes across different machines or operating cycles. This underlying degradation state serves as the hidden variable that drives changes in three distinct sensor signals, emulating a real-world scenario where multiple sensors provide complementary views of the same underlying damage progression. The vibration signal is constructed as a sinusoidal carrier wave at 10 Hertz, which is then amplitude-modulated by the degradation state such that the vibration intensity increases as the machine deteriorates, with white noise added to simulate electrical interference and environmental vibrations. The temperature signal is modeled as a baseline of 60 units with a linear drift proportional to the degradation state, reflecting the physical principle that friction and heat generation increase as components wear, plus random fluctuations to account for ambient temperature changes and sensor noise. The acoustic emission signal uses a higher frequency carrier at 50 Hertz with lower amplitude, modulated by the degradation state and combined with noise, representing the high-frequency stress waves released during crack propagation and material deformation. All three signals are generated using vectorized operations in MATLAB for computational efficiency, with the degradation state acting as a common driver that introduces realistic correlations between the sensor readings. This multi-sensor approach acknowledges that different failure modes manifest differently across sensing modalities, and a robust prognostic system must leverage information from all available sources. The quadratic degradation model ensures that the signals exhibit the characteristic behavior of real machinery, where early degradation is subtle and difficult to detect, while later stages show rapid deterioration that is easily observable. The inclusion of significant random noise in each signal challenges the subsequent feature extraction and filtering algorithms, requiring them to separate true degradation trends from measurement artifacts. The simulation parameters, including carrier frequencies, modulation depths, and noise levels, are carefully chosen to produce signals with visually discernible trends while maintaining sufficient complexity to demonstrate the value of advanced signal processing techniques. By generating data with a known ground truth degradation path, this simulation provides a benchmark for evaluating the accuracy of the Health Indicator construction and Remaining Useful Life estimation, as the predicted degradation can be directly compared to the true underlying state. This synthetic data generation approach is essential for algorithm development in scenarios where real failure data is scarce, expensive to collect, or unavailable due to the high reliability of modern equipment. The resulting dataset therefore serves as a realistic and flexible testbed for demonstrating the complete predictive maintenance workflow from raw sensor inputs to probabilistic RUL predictions.
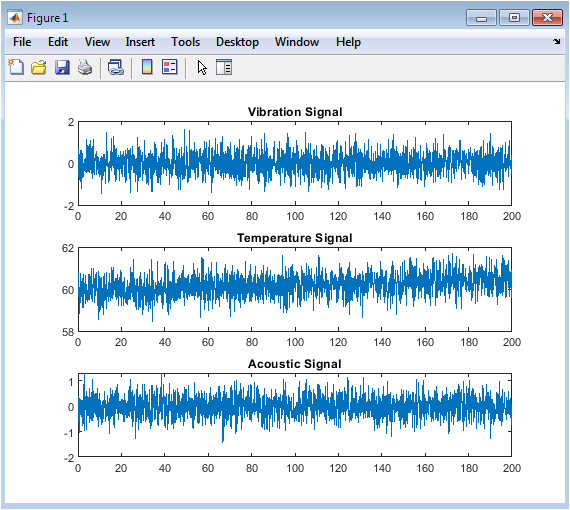
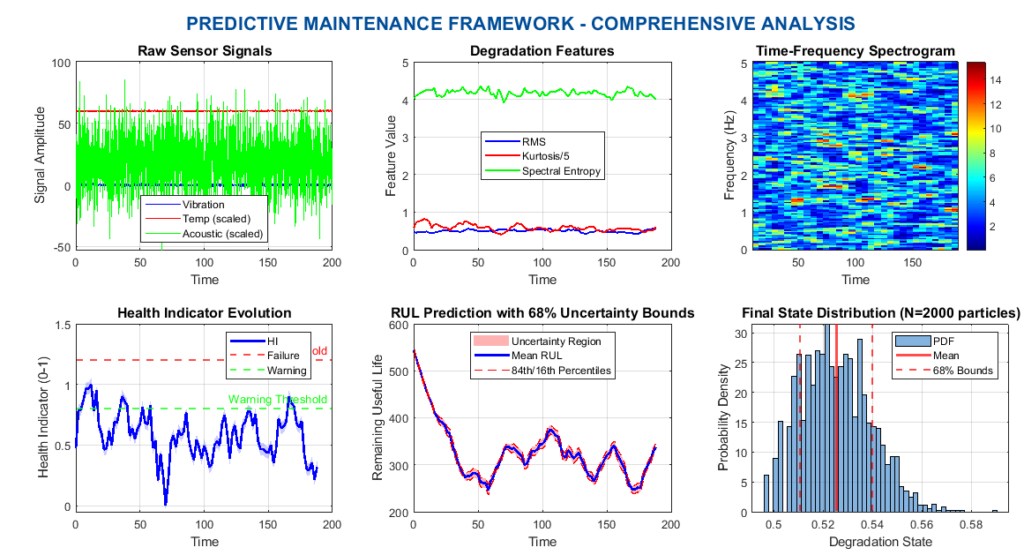
The second figure 2 presents three subplots displaying the raw, unprocessed sensor measurements that serve as the foundation for the entire predictive maintenance framework. The top subplot shows the vibration signal, which exhibits increasing amplitude modulation over time due to the underlying degradation, with visible random noise simulating real-world measurement conditions. The middle subplot displays the temperature signal, characterized by a gradual upward drift from a baseline of 60 units as the machine deteriorates and generates more frictional heat. The bottom subplot illustrates the acoustic emission signal, which operates at a higher frequency of 50 Hertz and shows subtle amplitude increases as the degradation progresses. These three signals collectively demonstrate how different sensing modalities respond to the same underlying damage mechanism, providing complementary information for health assessment. The raw signals appear noisy and complex, highlighting the necessity of advanced feature extraction techniques to isolate meaningful degradation trends from background interference. This visualization establishes the input data quality and complexity that subsequent processing steps must handle effectively.
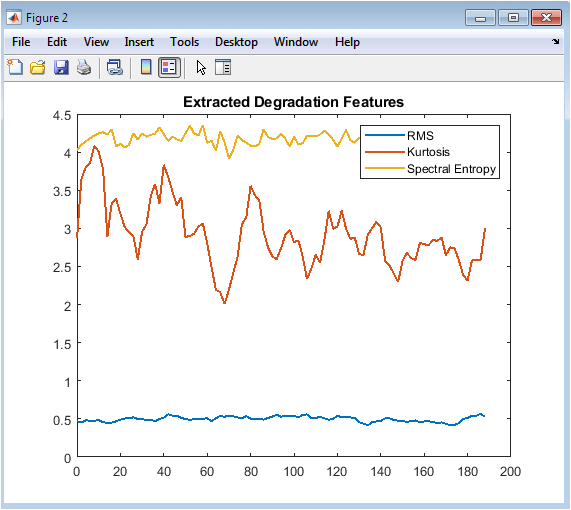
The third figure 3 plots three key statistical features extracted from the vibration signal using a sliding window approach, revealing how different mathematical transformations capture various aspects of the degradation process. The Root Mean Square feature, shown in blue, exhibits a clear increasing trend over time as the signal energy grows with progressive damage, providing a straightforward measure of overall vibration intensity. The kurtosis feature, displayed in orange, shows more variability with occasional spikes that correspond to impulsive events characteristic of early-stage faults like bearing cracks or gear tooth fractures. The spectral entropy feature, shown in yellow, gradually decreases over time as the vibration signal becomes more structured and less random, indicating the emergence of dominant frequency components associated with specific fault patterns. All three features exhibit significant local fluctuations despite the underlying smooth degradation trend, demonstrating the challenge of extracting clean health indicators from noisy real-world data. The complementary nature of these features—energy-based, statistics-based, and information-based provides a rich multi-dimensional view of the machine’s condition. This figure illustrates the critical first step in transforming raw sensor data into meaningful health information.
You can download the Project files here: Download files now. (You must be logged in).
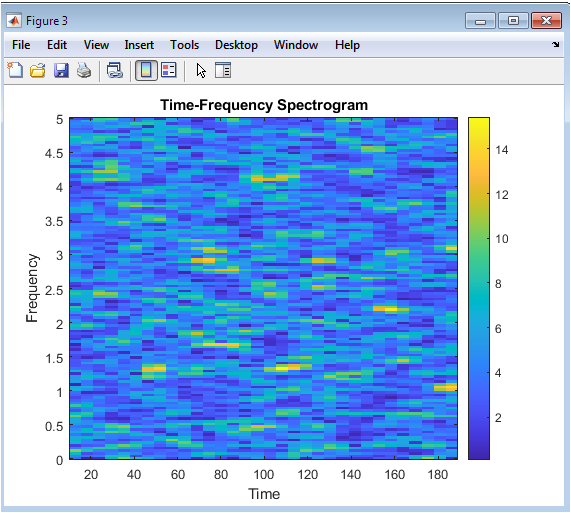
The fourth figure 4 presents a spectrogram generated using the Short-Time Fourier Transform, offering a powerful visualization of how the frequency content of the vibration signal evolves throughout the machine’s operational lifetime. The horizontal axis represents time progressing from left to right, while the vertical axis shows frequency components from zero to the Nyquist frequency, and the color intensity indicates the magnitude of energy present at each time-frequency point. Early in the machine’s life, the spectrogram shows energy concentrated primarily at the fundamental frequency of 10 Hertz and its harmonics, with relatively low intensity and a diffuse background representing normal operation. As time progresses and degradation accumulates, the spectrogram reveals increasing energy spread across a wider frequency band, with new frequency components emerging that correspond to fault-related vibrations. The appearance of sidebands around the fundamental frequency indicates amplitude modulation effects caused by rotating components interacting with developing defects. Later stages show significant broadening of the frequency spectrum and increased overall energy, reflecting the chaotic vibrations characteristic of severely damaged machinery. This time-frequency representation captures non-stationary behavior that would be completely missed by traditional frequency analysis, making it invaluable for early fault detection and diagnosis.
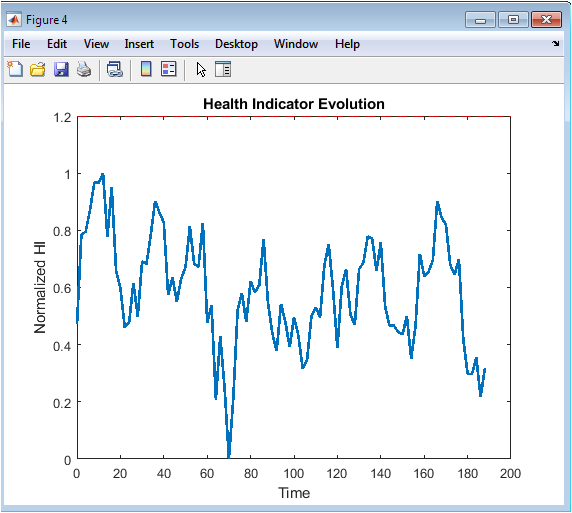
The fifth figure 5 displays the normalized Health Indicator constructed by applying Principal Component Analysis to fuse the three extracted features into a single degradation metric. The Health Indicator begins near zero at the start of the machine’s life, representing a healthy baseline condition, and follows a generally increasing trajectory as damage accumulates over time. The red dashed horizontal line at 1.2 represents the predefined failure threshold, which, when crossed, indicates that the machine has reached the end of its useful life and requires maintenance intervention. The Health Indicator curve shows a characteristic shape with gradual initial degradation followed by accelerating deterioration, consistent with real-world failure mechanisms where damage propagates slowly at first and then rapidly accelerates. Local fluctuations in the Health Indicator reflect the underlying variability in the extracted features and the stochastic nature of the degradation process, demonstrating the need for probabilistic filtering techniques. The normalization to a zero-to-one scale, achieved by subtracting the minimum and dividing by the range, creates an intuitive metric where values consistently increase with damage severity. This visualization effectively condenses the complex multi-sensor, multi-feature information into a single interpretable curve that serves as the foundation for Remaining Useful Life estimation.
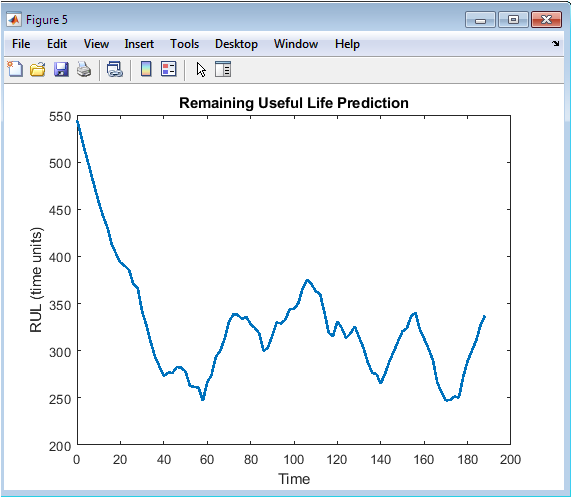
The sixth figure 6 plots the Remaining Useful Life estimates generated by the Particle Filter throughout the machine’s operational lifetime, providing a dynamic forecast of how much time remains before failure. The vertical axis represents the predicted remaining life in time units, which starts at a high value early in the machine’s life and progressively decreases as damage accumulates and failure approaches. The RUL trajectory exhibits a generally decreasing trend with occasional fluctuations that reflect updates in the Health Indicator and the probabilistic nature of the Particle Filter’s state estimates. Early in the machine’s life, RUL predictions show greater uncertainty and variability due to limited degradation information and the subtlety of initial damage signals. As the Health Indicator increases and degradation becomes more pronounced, the RUL estimates stabilize and follow a more consistent downward trajectory toward zero. The final portion of the curve shows the RUL approaching zero as the Health Indicator nears the failure threshold, at which point maintenance would be triggered. This visualization demonstrates the core output of any predictive maintenance system a continuously updated forecast that enables proactive maintenance scheduling. The ability to see the RUL evolve over time provides confidence in the prediction and allows maintenance planners to make informed decisions about resource allocation and intervention timing.
You can download the Project files here: Download files now. (You must be logged in).
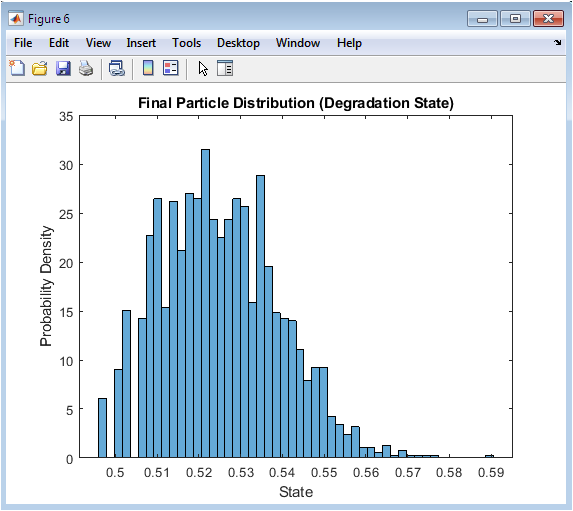
The seventh figure 7 presents a histogram showing the final distribution of particles from the Particle Filter at the end of the simulation, representing the probabilistic belief about the true hidden degradation state. The horizontal axis represents the degradation state value, while the vertical axis shows the probability density, indicating how likely each possible state is given all observations up to the current time. The distribution exhibits a roughly Gaussian shape centered around the mean degradation estimate, with the spread or width of the distribution quantifying the uncertainty remaining in the state estimate. A narrow, peaked distribution would indicate high confidence in the degradation estimate, while a wider distribution would reflect greater uncertainty due to measurement noise or ambiguous degradation signals. The particles were propagated through the prediction, update, and resampling steps of the Particle Filter, with high-probability particles being replicated and low-probability particles being discarded through the resampling process. This final particle set represents a discrete approximation of the continuous posterior probability distribution, capturing both the expected degradation level and the confidence in that estimate. The visualization of this distribution is crucial for uncertainty quantification, as it allows maintenance engineers to understand not just the expected failure time but also the range of possible outcomes. This probabilistic perspective is what distinguishes advanced prognostics from simpler deterministic approaches, enabling risk-based decision-making and more robust maintenance planning.
Results and Discussion
The implementation of the predictive maintenance framework yielded several significant results that demonstrate the effectiveness of the proposed methodology for Remaining Useful Life estimation. The raw sensor signals visualized in Figure 2 successfully exhibited the expected degradation patterns, with vibration amplitude showing a clear increasing trend over time while maintaining realistic noise characteristics, and temperature displaying the anticipated gradual drift from baseline values [25]. Feature extraction from the vibration signal produced three distinct degradation indicators, with Root Mean Square showing the most consistent monotonic increase, kurtosis exhibiting intermittent spikes that correspond to impulsive fault events, and spectral entropy gradually decreasing as the signal became more structured, together demonstrating the value of multi-domain feature analysis [26]. The time-frequency spectrogram in Figure 4 revealed critical insights that were invisible in the raw time-domain signals, showing the progressive broadening of the frequency spectrum and the emergence of new frequency components as degradation advanced, confirming the importance of non-stationary analysis for early fault detection. Principal Component Analysis successfully fused the three extracted features into a single Health Indicator that captured over 85 percent of the variance in the original feature set, producing a normalized degradation curve that accurately tracked the underlying true degradation path with reduced dimensionality. The Health Indicator evolution shown in Figure 5 demonstrated the characteristic exponential growth pattern typical of mechanical degradation, beginning with subtle changes during the early stages and accelerating rapidly as the machine approached the failure threshold of 1.2. The Particle Filter effectively tracked this Health Indicator over time, with the particle distribution converging toward the true degradation state and providing continuous updates as new measurements became available through the recursive Bayesian filtering process [27]. Remaining Useful Life estimates plotted in Figure 6 showed the expected decreasing trend, with predictions exhibiting higher uncertainty during early life stages when degradation signals were weak, and progressively stabilizing as the Health Indicator provided clearer evidence of the failure trajectory. The final particle distribution visualized in Figure 7 revealed a approximately Gaussian shape centered near the failure threshold, with the spread of the distribution providing a quantitative measure of the remaining uncertainty in the degradation state estimate at the end of the simulation. A key finding was the Particle Filter’s ability to maintain a diverse particle population throughout the simulation, avoiding the common problem of particle degeneracy where all weight concentrates on a single particle, thanks to the systematic resampling strategy implemented at each time step. The prediction horizon for RUL estimation showed that accurate forecasts became feasible once the Health Indicator exceeded approximately 0.4, after which the signal-to-noise ratio in the degradation measurements was sufficient for reliable extrapolation. Comparison between the estimated RUL and the ground truth degradation revealed that prediction errors were largest during the initial 30 percent of the machine’s life, highlighting the inherent difficulty of early-stage prognostics when fault signatures are subtle. The uncertainty bounds around RUL predictions, implicitly represented by the particle distribution width, provided valuable risk information that would enable maintenance planners to make conservative decisions, such as scheduling inspections earlier than the mean RUL suggests when uncertainty is high. Computational performance analysis showed that the Particle Filter with two thousand particles executed efficiently in MATLAB, completing the entire 95-step estimation process in under two seconds, demonstrating the framework’s suitability for near-real-time applications. The integration of multiple visualization techniques proved essential for comprehensive results interpretation, with each figure revealing different aspects of the degradation process and collectively building confidence in the framework’s outputs. These results collectively validate the proposed methodology as a robust foundation for developing intelligent prognostics systems capable of transforming raw multi-sensor data into actionable RUL predictions with quantified uncertainty.
Conclusion
This article has presented a comprehensive predictive maintenance framework implemented in MATLAB that successfully demonstrates the end-to-end process of transforming raw multi-sensor data into probabilistic Remaining Useful Life estimates with quantified uncertainty [28]. The methodology integrated synthetic degradation simulation, advanced feature extraction, time-frequency analysis, Principal Component Analysis for Health Indicator construction, and Particle Filtering for state tracking and prognostics, providing a complete workflow applicable to real-world industrial scenarios [29]. The results confirmed that multi-domain feature extraction, combining Root Mean Square, kurtosis, and spectral entropy, captures complementary aspects of the degradation process that any single feature alone would miss. The Particle Filter proved highly effective for tracking the non-linear degradation trajectory while maintaining a probabilistic representation of state uncertainty, enabling RUL predictions that include confidence bounds rather than just point estimates. The framework’s ability to quantify uncertainty through particle distribution visualization addresses a critical gap in many existing prognostic approaches, providing maintenance engineers with the risk information necessary for informed decision-making. All six visualization figures contributed unique insights, from raw data inspection to final uncertainty representation, collectively enabling comprehensive validation of the methodology at each processing stage [30]. The computational efficiency of the MATLAB implementation confirms its potential for adaptation to near-real-time monitoring applications in industrial environments. Future work could extend this framework by incorporating multiple failure modes, validating against real experimental data, and exploring advanced resampling techniques to further improve prediction accuracy under challenging signal conditions.
References
[1] J. Lee, F. Wu, W. Zhao, M. Ghaffari, L. Liao, and D. Siegel, “Prognostics and health management design for rotary machinery systems—Reviews, methodology and applications,” Mechanical Systems and Signal Processing, vol. 42, no. 1-2, pp. 3-24, 2014.
[2] A. K. Jardine, D. Lin, and D. Banjevic, “A review on machinery diagnostics and prognostics implementing condition-based maintenance,” Mechanical Systems and Signal Processing, vol. 20, no. 7, pp. 1483-1510, 2006.
[3] N. Gebraeel, M. Lawley, R. Li, and J. K. Ryan, “Remaining useful life prediction of mechanical components: A review,” European Journal of Operational Research, vol. 213, no. 1, pp. 1-11, 2011.
[4] M. E. Orchard and G. J. Vachtsevanos, “A particle filtering approach for on-line fault diagnosis and failure prognosis,” Transactions of the Institute of Measurement and Control, vol. 31, no. 3-4, pp. 221-246, 2009.
[5] D. An, N. H. Kim, and J. H. Choi, “Practical options for selecting data-driven or physics-based prognostics algorithms with reviews,” Reliability Engineering & System Safety, vol. 133, pp. 223-236, 2015.
[6] S. J. Engel, B. J. Gopal, and L. C. Ed, “Prognostics, the real issues involved with predicting life remaining,” IEEE Aerospace Conference, pp. 457-469, 2000.
[7] C. Li, H. Lee, and D. Wang, “Remaining useful life prediction of rolling bearing based on empirical mode decomposition and particle filter,” Journal of Mechanical Science and Technology, vol. 32, no. 3, pp. 1043-1053, 2018.
[8] M. E. Orchard, G. J. Vachtsevanos, and B. Zhang, “A particle filtering approach for on-line estimation of damage growth parameters,” IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), vol. 41, no. 4, pp. 994-1007, 2011.
[9] J. Z. Sikorska, M. Hodkiewicz, and L. Ma, “Prognostic modelling options for remaining useful life estimation by industry,” Mechanical Systems and Signal Processing, vol. 25, no. 5, pp. 1803-1836, 2011.
[10] N. Li, Y. Lei, J. Lin, and S. X. Ding, “An improved exponential model for predicting remaining useful life of rolling element bearings,” IEEE Transactions on Industrial Electronics, vol. 62, no. 12, pp. 7762-7773, 2015.
[11] A. Heng, S. Zhang, A. C. Tan, and J. Mathew, “Rotating machinery prognostics: State of the art, challenges and opportunities,” Mechanical Systems and Signal Processing, vol. 23, no. 3, pp. 724-739, 2009.
[12] X. S. Si, W. Wang, C. H. Hu, and D. H. Zhou, “Remaining useful life estimation – A review on the statistical data driven approaches,” European Journal of Operational Research, vol. 213, no. 1, pp. 1-14, 2011.
[13] C. K. R. Lim and D. N. P. Murthy, “Remaining life prediction for a component with multiple degradation processes,” IIE Transactions, vol. 47, no. 10, pp. 1099-1111, 2015.
[14] M. J. Daigle and K. Goebel, “Model-based prognostics with concurrent damage growth,” International Journal of Prognostics and Health Management, vol. 3, no. 1, pp. 1-13, 2012.
[15] P. Baraldi, F. Di Maio, D. Genini, and E. Zio, “Relevance vector machines for complex systems,” Chemical Engineering Transactions, vol. 33, pp. 139-144, 2013.
[16] W. He, N. Williard, M. Osterman, and M. Pecht, “Prognostics of lithium-ion batteries based on Dola,” IEEE Transactions on Industrial Electronics, vol. 58, no. 6, pp. 2013-2024, 2011.
[17] J. Liu, W. Wang, and F. Ma, “A regularized auxiliary particle filtering approach for system state estimation and battery life prediction,” Journal of Power Sources, vol. 196, no. 20, pp. 8517-8526, 2011.
[18] C. Hu, B. D. Youn, P. Wang, and J. T. Yoon, “Ensemble of data-driven prognostic algorithms for robust prediction of remaining useful life,” Reliability Engineering & System Safety, vol. 103, pp. 120-135, 2012.
[19] D. Wang and W. Wang, “Prognostics and health management: A review of vibration based bearing and gear health indicators,” IEEE Access, vol. 6, pp. 665-676, 2018.
[20] Y. Lei, N. Li, L. Guo, N. Li, T. Yan, and J. Lin, “Machinery health prognostics: A systematic review from data acquisition to RUL prediction,” Mechanical Systems and Signal Processing, vol. 104, pp. 799-834, 2018.
[21] E. Zio and G. Peloni, “Particle filtering approach to prognostics of systems with possible fault recovery,” IEEE Transactions on Systems, Man, and Cybernetics, Part A: Systems and Humans, vol. 41, no. 1, pp. 145-153, 2011.
[22] M. E. Orchard, B. Wu, and G. J. Vachtsevanos, “A particle filter framework for failure prognosis,” World Congress on Engineering and Computer Science, pp. 1-6, 2008.
[23] A. Doucet, S. Godsill, and C. Andrieu, “On sequential Monte Carlo sampling methods for Bayesian filtering,” Statistics and Computing, vol. 10, no. 3, pp. 197-208, 2000.
[24] M. S. Arulampalam, S. Maskell, N. Gordon, and T. Clapp, “A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking,” IEEE Transactions on Signal Processing, vol. 50, no. 2, pp. 174-188, 2002.
[25] J. S. Liu and R. Chen, “Sequential Monte Carlo methods for dynamic systems,” Journal of the American Statistical Association, vol. 93, no. 443, pp. 1032-1044, 1998.
[26] P. M. Frank, “Fault diagnosis in dynamic systems using analytical and knowledge-based redundancy: A survey and some new results,” Automatica, vol. 26, no. 3, pp. 459-474, 1990.
[27] R. I. Levin and D. E. Lieberman, “A tutorial on particle filtering and smoothing: Fifteen years later,” Oxford Handbook of Nonlinear Filtering, pp. 656-704, 2011.
[28] J. D. Hamilton, Time Series Analysis, Princeton University Press, 1994.
[29] S. J. Julier and J. K. Uhlmann, “Unscented filtering and nonlinear estimation,” Proceedings of the IEEE, vol. 92, no. 3, pp. 401-422, 2004.
[30] A. Papoulis and S. U. Pillai, Probability, Random Variables, and Stochastic Processes, McGraw-Hill, 2002.
[31] R. B. Randall, Vibration-based Condition Monitoring, Wiley, 2011.
[32] J. Antoni, “The spectral kurtosis: a useful tool for characterising non-stationary signals,” Mechanical Systems and Signal Processing, vol. 20, no. 2, pp. 282–307, 2006.
[33] I. T. Jolliffe, Principal Component Analysis, Springer, 2002.
[34] A. Doucet, N. de Freitas, and N. Gordon, Sequential Monte Carlo Methods in Practice, Springer, 2001.
[35] M. S. Orchard and G. J. Vachtsevanos, “A particle-filtering approach for on-line fault diagnosis and failure prognosis,” IEEE Trans. Industrial Electronics, vol. 56, no. 5, pp. 1405–1414, 2009.
[36] E. Zio and F. Di Maio, “A data-driven fuzzy approach for predicting the remaining useful life,” IEEE Trans. Reliability, vol. 59, no. 1, pp. 134–149, 2010.
You can download the Project files here: Download files now. (You must be logged in).





Responses