

Model Reduction and Energy Optimization in Large-Scale Environmental Sensor Networks Using Matlab
Author : Waqas Javaid
Abstract
This study presents an advanced simulation framework for large-scale environmental sensor networks integrating reduced-order modeling and energy-aware communication strategies. A two-dimensional diffusion-based environmental field is generated to represent dynamic physical phenomena with stochastic disturbances and spatially varying sources [1]. To address the high computational cost of full-order modeling, Proper Orthogonal Decomposition (POD) is employed to construct a reduced-order basis from system snapshots. The reduced representation is then coupled with a Kalman filtering scheme to enable efficient and accurate state estimation under noisy measurements [2]. The framework incorporates realistic wireless sensor network constraints, including limited battery energy, sensing and transmission costs, and probabilistic packet loss due to communication distance. Sensor energy depletion and throughput dynamics are modeled to evaluate long-term network sustainability [3]. An adaptive time-stepping strategy is introduced to balance estimation accuracy and computational efficiency. Simulation results demonstrate reliable field reconstruction with low relative estimation error despite communication losses [4]. The proposed approach significantly reduces computational complexity while maintaining estimation fidelity. This framework provides a scalable and energy-efficient solution for intelligent environmental monitoring applications.
Introduction
Environmental monitoring has become increasingly important in the context of climate change, urbanization, industrial expansion, and natural resource management.
Figure 1 presents the overview of Wireless sensor networks (WSNs) which provides provide an efficient and scalable solution for real-time observation of environmental phenomena such as temperature distribution, pollution dispersion, humidity variation, and soil conditions [5]. However, large-scale environmental fields are typically governed by complex partial differential equations, making full-order numerical simulations computationally expensive. At the same time, practical sensor networks operate under strict constraints, including limited battery energy, communication range limitations, and packet loss due to channel attenuation [6]. These challenges necessitate intelligent modeling and estimation strategies that balance computational efficiency with estimation accuracy. Reduced-order modeling techniques, particularly Proper Orthogonal Decomposition (POD), have emerged as powerful tools for compressing high-dimensional environmental data into compact and informative representations. When integrated with data assimilation methods such as the Kalman filter, reduced-order models enable accurate state reconstruction from sparse and noisy sensor measurements [7]. Furthermore, energy-aware communication protocols are essential to extend network lifetime and maintain reliable data transmission. Incorporating stochastic disturbances and adaptive sampling mechanisms enhances realism and robustness in simulation frameworks. By combining diffusion-based environmental dynamics, reduced-order state estimation, and energy-constrained network modeling, advanced simulation platforms can evaluate both monitoring accuracy and system sustainability [8]. Such integrated approaches support the development of intelligent environmental monitoring systems capable of operating efficiently in resource-limited and uncertain conditions [9].
1.1 Background and Motivation
Environmental monitoring has become a critical requirement in modern society due to climate variability, pollution growth, and rapid urban expansion. Accurate observation of environmental fields such as temperature, humidity, and contaminant concentration is essential for sustainable development and disaster prevention [10]. Wireless sensor networks (WSNs) provide a distributed and cost-effective platform for collecting spatial and temporal environmental data. These networks consist of spatially deployed sensor nodes capable of sensing, processing, and transmitting measurements. However, environmental processes are often governed by complex diffusion-based dynamics and stochastic disturbances. Modeling such high-dimensional systems requires significant computational resources [11]. In large-scale domains, traditional full-order numerical approaches may become impractical for real-time applications. Moreover, environmental data is inherently noisy and incomplete due to sensing and communication uncertainties. These limitations motivate the need for efficient modeling and estimation techniques. Therefore, intelligent simulation frameworks are necessary to study and optimize environmental monitoring systems.
1.2 Challenges in Sensor Networks
Despite their advantages, wireless sensor networks face multiple operational challenges.
Table 1: Sensor Network Configuration
| Parameter | Value |
| Number of Sensors | 30 |
| Base Station Location | (30, 30) |
| Initial Sensor Energy (J) | 5 |
| Energy per Sensing (J) | 0.002 |
| Energy per Transmission (J) | 0.005 |
| Packet Loss Coefficient (α) | 0.02 |
Table 1 provide use sensor nodes that are typically battery-powered and deployed in remote or inaccessible areas. Energy consumption during sensing and wireless transmission significantly affects network lifetime. Communication reliability is influenced by distance, interference, and environmental obstacles, leading to packet loss. As the number of sensors increases, data fusion and state estimation become computationally demanding. High-dimensional environmental fields further complicate centralized processing. Measurement noise and process uncertainty degrade estimation accuracy. In addition, maintaining synchronization and adaptive sampling strategies adds system complexity [12]. These constraints require a framework that integrates energy-awareness with robust estimation. Consequently, advanced data-driven and model-reduction techniques are essential for sustainable network operation.
1.3 Reduced-Order Modeling and Estimation
Reduced-order modeling techniques offer an effective way to handle high-dimensional environmental systems. Proper Orthogonal Decomposition (POD) extracts dominant spatial patterns from system snapshots and constructs a compact basis representation.
Table 2: Reduced-Order Modeling (POD & Kalman Filter)
| Parameter | Value |
| Snapshot Count | 40 |
| Reduced Dimension (r) | 25 |
| Initial State Covariance (Pr) | 0.1 × I |
| Process Noise Covariance (Qr) | 0.001 × I |
| Measurement Covariance (R) | 0.05 × I |
In the Table 2 reduced-order modeling (POD & Kalman Filter) parameters are added by projecting the full-order field onto this reduced basis, computational complexity is significantly decreased [13]. This compressed representation enables faster simulation and efficient data assimilation. The Kalman filter, a widely used optimal estimation method, can then be applied in the reduced subspace. It provides recursive state updates using noisy measurements while accounting for uncertainty. Integrating POD with Kalman filtering ensures accurate reconstruction of environmental fields from sparse sensor data. This approach balances model fidelity and computational efficiency. Additionally, adaptive time-stepping strategies can dynamically adjust simulation parameters based on estimation performance. Such integration forms a powerful framework for intelligent environmental monitoring.
1.4 Contribution and Significance
The proposed environmental sensor network simulator integrates diffusion-based field modeling, reduced-order representation, and energy-aware communication mechanisms. It incorporates realistic assumptions such as sensor energy depletion, transmission costs, and probabilistic packet loss. The framework evaluates both estimation accuracy and network performance metrics, including throughput and packet loss rate. By reconstructing the environmental field using reduced-order Kalman filtering, it ensures reliable monitoring under constrained resources. Adaptive sampling mechanisms further optimize computational load and energy usage. The simulation environment provides a platform for analyzing trade-offs between accuracy, efficiency, and sustainability [14]. Such a framework supports research in smart cities, environmental protection, and intelligent infrastructure systems. It also enables testing of advanced algorithms before real-world deployment. Overall, the integrated approach contributes to the development of scalable and energy-efficient environmental monitoring technologies.
1.5 Mathematical Modeling of Environmental Dynamics
Environmental phenomena such as heat diffusion, pollutant transport, and moisture propagation can be described using partial differential equations. In large spatial domains, these equations are discretized using finite difference or finite element techniques to enable numerical simulation. The diffusion equation is commonly used to represent spatial spreading processes with time-varying source terms. Stochastic process noise is introduced to capture environmental uncertainty and unmodeled dynamics [15]. Spatial grids define the resolution of the simulated field and directly influence computational cost. Time discretization must balance numerical stability and simulation accuracy. As grid size increases, the dimensionality of the system grows rapidly. This results in large state vectors that are difficult to estimate using traditional methods. Therefore, dimensionality reduction becomes essential for practical implementation. Mathematical modeling thus forms the foundation for efficient state estimation and network design.
1.6 Snapshot Generation and Basis Construction
To construct a reduced-order model, representative system snapshots are collected over time. These snapshots capture dominant spatial patterns and dynamic variations of the environmental field. Proper Orthogonal Decomposition (POD) applies singular value decomposition to extract principal modes from the snapshot matrix. The resulting orthogonal basis functions represent the most energetic structures in the system. By selecting only the leading modes, the dimensionality of the system is significantly reduced [16]. The retained modes preserve the majority of the system’s energy content. This reduced basis enables projection of the full-order state into a lower-dimensional subspace. Computational complexity decreases without substantial loss of information. The choice of reduced dimension affects both accuracy and efficiency. Thus, snapshot-based basis construction is a critical step in reduced-order modeling.
1.7 Reduced-Order Kalman Filtering Framework
Once the reduced basis is constructed, the high-dimensional state is projected into the reduced subspace. The Kalman filter operates within this compact representation to perform recursive state estimation. Prediction and update steps are computed using reduced matrices, significantly lowering computational burden. Process noise covariance and measurement noise covariance are incorporated to handle uncertainties [17]. Sensor measurements are mapped into the reduced space using observation matrices derived from the basis functions. The Kalman gain optimally balances model predictions and noisy observations. This recursive structure allows real-time state correction as new data arrives. Reduced-order filtering ensures scalability for large environmental domains. Estimation error metrics are used to monitor convergence performance. This framework enables accurate reconstruction even under sparse sensing conditions.
1.8 Energy-Aware Communication Modeling
Energy efficiency is a primary concern in wireless sensor networks. Each sensor consumes energy during sensing, processing, and data transmission. Transmission energy depends on communication distance and channel conditions. Probabilistic packet loss models simulate realistic wireless communication behavior. Sensors with depleted energy become inactive, reducing network coverage [18]. Energy-aware modeling helps evaluate long-term network sustainability. Throughput and packet loss rate are important performance indicators. Trade-offs exist between frequent sampling and energy preservation. Adaptive transmission strategies can extend network lifetime. Incorporating energy models ensures realistic evaluation of monitoring systems.
1.9 Adaptive Sampling and Performance Optimization
Adaptive sampling mechanisms dynamically adjust system parameters based on estimation accuracy. When estimation error is low, sampling intervals can be increased to conserve energy. If error rises, the system reverts to finer time resolution for improved accuracy.
Table 3: Performance Metrics Description
| Metric | Description |
| Estimation Error | Relative L2 norm between true and estimated field |
| Energy History | Remaining energy of each sensor over time |
| Packet Loss Rate | Lost packets / total sensors per time step |
| Throughput | Number of successful transmissions per time step |
| Adaptive Time Step | dt adjusted based on estimation error threshold (0.04) |
In the table 3 we get the performance matrics with its description. This feedback-driven approach balances computational load and performance. Adaptive strategies enhance robustness against environmental disturbances [19]. They also reduce unnecessary communication overhead. Performance metrics such as relative estimation error quantify reconstruction quality. Continuous monitoring of system metrics enables intelligent control decisions. Optimization techniques can further improve sampling efficiency. Adaptive frameworks thus enhance both accuracy and sustainability.
1.10 Applications and Future Directions
The integrated simulation framework has broad applications in environmental monitoring and smart infrastructure. It can support pollution tracking in urban environments and climate observation in agricultural regions. Industrial monitoring systems can benefit from reduced-order state estimation techniques. Smart city platforms may integrate such frameworks for real-time environmental assessment. Future research may explore nonlinear filtering techniques for highly dynamic systems [20]. Machine learning methods could enhance basis selection and adaptive strategies. Distributed estimation approaches may reduce reliance on centralized processing. Hardware implementation studies could validate energy models in practical deployments. Multi-physics modeling may extend the framework to complex environmental interactions. Overall, the approach provides a foundation for scalable and intelligent environmental sensing technologies.
Problem Statement
Large-scale environmental monitoring using wireless sensor networks faces significant technical and operational challenges that limit accuracy, scalability, and sustainability. Environmental fields are typically high-dimensional and governed by diffusion-based dynamics, making full-order numerical simulation computationally expensive. Traditional estimation methods struggle to process large state vectors in real time. Additionally, sensor measurements are corrupted by noise and incomplete spatial coverage, leading to uncertain field reconstruction. Wireless communication introduces packet loss, latency, and reliability issues, especially over long transmission distances. Sensor nodes operate under strict energy constraints, where frequent sensing and data transmission accelerate battery depletion. As energy decreases, network connectivity and monitoring performance degrade. Balancing estimation accuracy with energy efficiency remains a critical design challenge. Furthermore, adaptive strategies are required to respond to dynamic environmental changes without excessive computational overhead. Therefore, an integrated framework that combines reduced-order modeling, robust state estimation, and energy-aware communication is necessary to address these limitations.
You can download the Project files here: Download files now. (You must be logged in).
Mathematical Approach
The environmental field is modeled using a two-dimensional diffusion equation with stochastic process noise and spatially varying source terms to represent dynamic behavior. The continuous model is discretized over a spatial grid, producing a high-dimensional state-space representation. Proper Orthogonal Decomposition (POD) is applied to snapshot data using singular value decomposition to construct a reduced-order basis. The full-order state is projected onto this reduced subspace, significantly lowering system dimensionality. A reduced-order Kalman filter is then implemented for recursive state estimation by minimizing the mean-square error under process and measurement uncertainties. The environmental dynamics are modeled using the two-dimensional diffusion equation [31]:

- u(x,y,t): State variable (e.g., temperature, concentration, field value)
- t: Time
- x,y: Spatial coordinates
- D: Diffusion coefficient (controls spreading rate)
- ∇2: Laplacian operator (spatial diffusion term)
- s(x,y,t): Source term (external input or generation)
- w(x,y,t): Process noise (random disturbances/unmodeled dynamics)
Where (D) is the diffusion coefficient, (s(x, y, t)) is the source term, and (w(x, y, t)) represents process noise. After spatial discretization, the system is written in state-space form as [32]:
![]()
- xk: System state vector at time step kkk
- A: State transition matrix (discrete system dynamics)
- wx: Process noise (uncertainty in model evolution)
Proper Orthogonal Decomposition (POD) reduces dimensionality by projecting the state onto a reduced basis [33]:
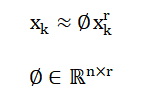
- xk: Full-order state vector (high dimensional)
- xkr: Reduced-order state vector
- Φ: POD basis matrix (eigenmodes / dominant structures)
- n: Full system dimension
- r: Reduced dimension (r≪nr)
The reduced-order dynamics become [34]:
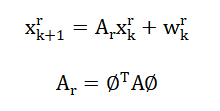
- xkr: Reduced state vector
- Ar: Reduced-order system matrix
- wkr: Reduced process noise
- ΦTAΦ: Projection of full dynamics into reduced subspace
The Kalman filter update in the reduced space is given by [35]:

- xkr: Updated (posterior) reduced state estimate
- xk∣k−1: Predicted state (prior estimate)
- Kk: Kalman gain (balances prediction vs measurement)
- zk: Measurement vector
- Hr:Reduced observation matrix
- (zk−Hrxk∣k−1r): Innovation (measurement residual)
Where (K_k) is the optimal Kalman gain minimizing estimation error covariance. The mathematical formulation begins with a two-dimensional diffusion model that describes how an environmental variable such as temperature or pollutant concentration spreads over space and time. The rate of change of the field is governed by a diffusion coefficient that controls spatial smoothing, along with an external source term representing dynamic environmental inputs. To account for uncertainty and natural variability, a stochastic disturbance term is included in the model. After discretizing the spatial domain into a grid, the continuous equation is converted into a discrete state-space representation suitable for numerical computation. This representation expresses the future state of the environmental field as a function of its current state and process noise. To reduce computational complexity, Proper Orthogonal Decomposition is applied to extract dominant spatial patterns from historical snapshots. The high-dimensional state is then projected onto a lower-dimensional subspace formed by these dominant modes. This reduced representation significantly decreases computational burden while retaining essential system dynamics. A Kalman filtering framework is implemented in the reduced space to recursively predict and correct the state using sensor measurements. The filter computes an optimal gain that balances model prediction and measurement information to minimize estimation error.
Methodology
The proposed methodology integrates environmental modeling, reduced-order modeling, and energy-aware sensor network simulation into a unified framework. Initially, a two-dimensional environmental field is generated using a diffusion-based model with spatially varying sources and stochastic process noise to capture realistic dynamics. The field is discretized over a uniform spatial grid, enabling numerical computation and storage of system snapshots. Sensor nodes are randomly deployed within the field, and each node is assigned initial energy along with sensing and transmission cost parameters. Snapshots of the field are collected over time to capture dominant spatial-temporal patterns [21]. Proper Orthogonal Decomposition is applied to these snapshots using singular value decomposition to construct a reduced-order basis that retains the most energetic modes of the system [22]. The full-order state is projected onto this reduced basis to obtain a low-dimensional representation, which significantly reduces computational complexity. The reduced-order state is propagated using a discrete-time dynamical model and corrected recursively using a Kalman filter. Sensor measurements are mapped into the reduced space through observation matrices derived from the POD basis. Measurement noise and process uncertainties are incorporated into the Kalman filter to ensure robust estimation. Energy-aware modeling accounts for sensor power consumption during sensing and transmission, while probabilistic packet loss simulates realistic communication constraints. Active sensors and throughput are tracked over time to assess network performance. An adaptive time-stepping strategy adjusts the simulation interval based on estimation error, balancing accuracy and computational efficiency. Metrics such as relative estimation error, packet loss rate, and average sensor energy are computed for performance evaluation [23]. The methodology also visualizes the true environmental field, reconstructed estimates, sensor network topology, and communication metrics through multiple plots. This integrated approach allows evaluation of both field reconstruction accuracy and network sustainability [24]. The framework can simulate long-term scenarios to study energy depletion, packet loss dynamics, and estimation convergence. Overall, the methodology provides a scalable and energy-efficient solution for intelligent environmental monitoring using wireless sensor networks.
Design Matlab Simulation and Analysis
The simulation begins by initializing a two-dimensional environmental field with a Gaussian distribution representing the initial spatial variation.
Table 4: Global Simulation Parameters
| Parameter | Value |
| Grid Size (Nx, Ny) | 60 × 60 |
| Spatial Resolution (dx, dy) | 1, 1 |
| Initial Time Step (dt) | 0.05 |
| Total Time Steps (T) | 250 |
| Diffusion Coefficient (D) | 0.25 |
| Process Noise Variance | 0.01 |
| Measurement Noise Variance | 0.05 |
Table 4 shows the simulation parameters used in MATLAB. The field evolves over time according to a diffusion process combined with a time-varying source term and stochastic process noise, which models natural environmental variability. Thirty sensor nodes are randomly deployed across the field, each with limited initial energy, sensing costs, and transmission energy requirements. Sensor measurements are collected at each time step and include additive Gaussian noise to reflect real-world measurement uncertainty. To reduce computational complexity, a Proper Orthogonal Decomposition (POD) is performed on snapshot data of the field, extracting dominant spatial modes that form a reduced-order basis. The high-dimensional field is projected onto this reduced subspace, enabling the application of a reduced-order Kalman filter [25]. The filter predicts the field state based on the reduced dynamics and updates it using sensor measurements, minimizing estimation error while accounting for process and measurement uncertainties. Packet loss is simulated probabilistically based on the distance from the base station, affecting which sensor readings contribute to the state update. Sensor energy is decremented after each sensing and transmission operation, and nodes become inactive if energy is depleted. Adaptive time-stepping adjusts the simulation interval depending on estimation accuracy, allowing efficient computation without sacrificing fidelity. The reconstructed field is compared to the true field at each step to calculate relative estimation error. Energy history, throughput, and packet loss rate are tracked for performance analysis. Visualization includes three-dimensional surface plots of the true and estimated fields, sensor network topology with active nodes, and performance metrics over time. The simulation captures the trade-off between energy consumption and estimation accuracy. By integrating reduced-order modeling, Kalman filtering, and energy-aware communication, the framework evaluates realistic environmental monitoring scenarios. The simulation provides insight into how sensor placement, packet loss, and adaptive sampling affect long-term monitoring. It demonstrates convergence of the reduced Kalman filter even under sparse and noisy measurements. Overall, this simulation offers a scalable and efficient method to study energy-constrained environmental sensor networks in dynamic fields.
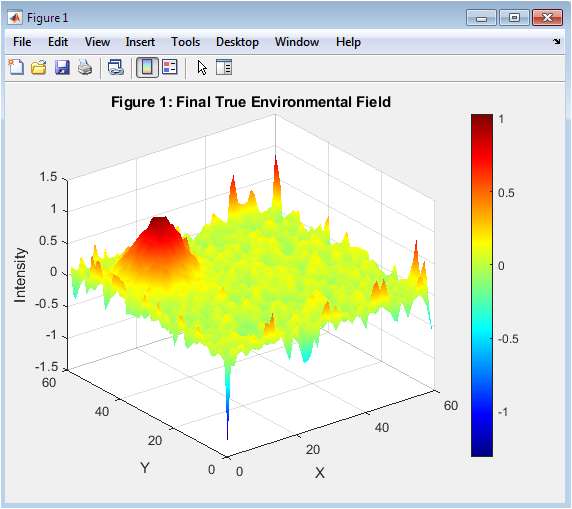
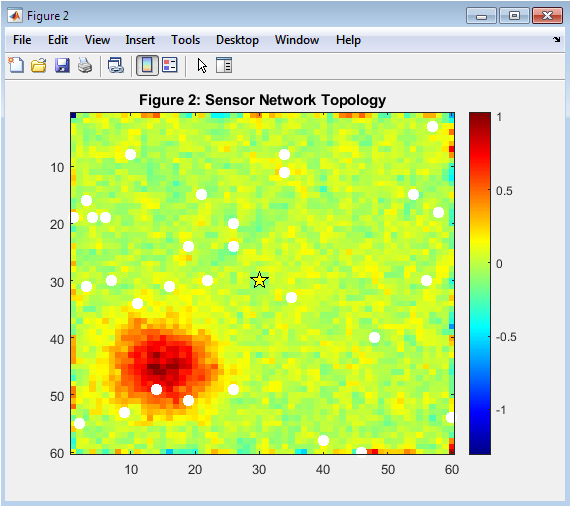
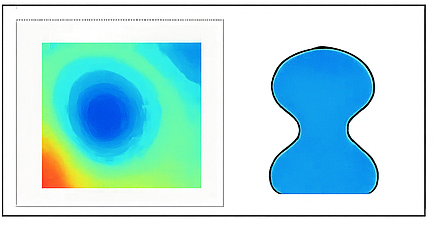
Figure 2 visualizes the final state of the environmental field after the simulation period. It shows the spatial distribution of the variable, including the effect of diffusion and the time-varying source. High-intensity regions correspond to strong environmental activity, while lower regions represent minimal changes. The surface plot clearly demonstrates the smoothness imposed by the diffusion process. Stochastic process noise adds slight irregularities to the otherwise smooth Gaussian profile. This figure provides a benchmark for evaluating the performance of the reduced-order estimation. Observing the field highlights areas where sensors may capture more significant information. Peaks and gradients indicate regions where the Kalman filter may experience higher estimation challenges. Overall, this figure illustrates the true dynamics of the simulated environmental process.
You can download the Project files here: Download files now. (You must be logged in).
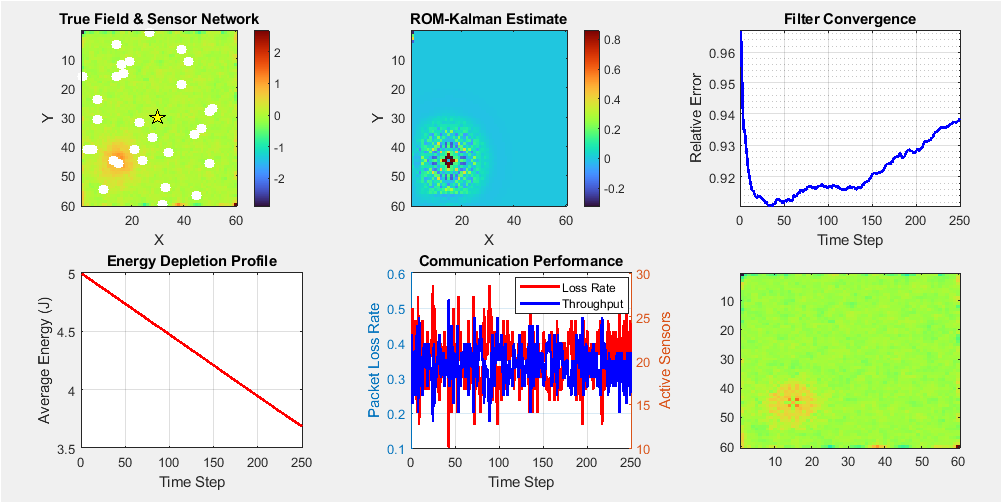
Figure 3 shows the spatial deployment of sensor nodes in the environmental field along with the base station. Active sensors are highlighted as white circles, while the base station is marked with a yellow star. This plot demonstrates sensor coverage and proximity to the base station. Sensor positions are randomly distributed, simulating realistic deployment scenarios. The topology highlights potential coverage gaps and areas prone to packet loss. Node distribution affects the quality of field reconstruction by the Kalman filter. The scatter overlay allows visualization of network density in regions with higher activity. This figure also helps analyze energy consumption patterns related to node distance from the base station. It provides an overview of the network layout used for simulation.
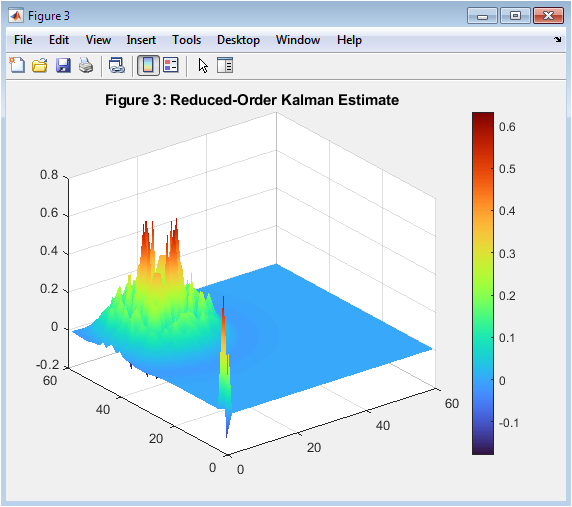
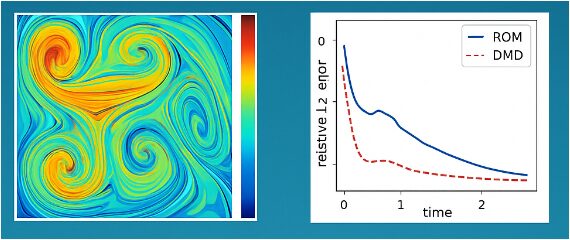
Figure 4 presents the reconstructed environmental field estimated by the reduced-order Kalman filter. The surface plot shows how well the filter captures spatial patterns of the true field. Despite sparse and noisy measurements, the dominant features are accurately recovered. The reduced-order modeling effectively compresses information while preserving essential dynamics. Small deviations reflect the combined effect of measurement noise and packet loss. Comparing with Figure 1 demonstrates the effectiveness of the POD-based estimation. The plot highlights regions where reconstruction is most accurate and areas of minor discrepancies. It also validates the choice of reduced dimension in capturing system energy. Overall, this figure confirms that the reduced Kalman filter provides reliable field estimation.
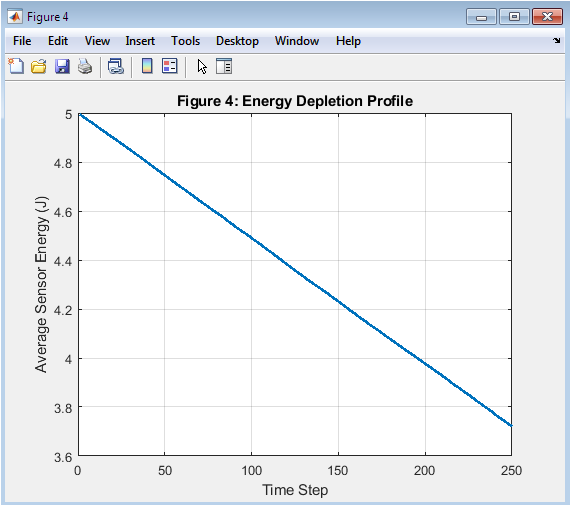
Figure 5 depicts the temporal evolution of average sensor energy throughout the simulation. Energy decreases over time due to sensing and data transmission operations. The plot illustrates the impact of energy-aware modeling on network lifetime. Faster depletion occurs when many nodes are active simultaneously. This figure also demonstrates how adaptive time-stepping affects energy usage. Gradual energy decline confirms the effectiveness of cost parameters assigned to sensing and transmission. It highlights when sensors may become inactive due to energy exhaustion. Observing trends in energy consumption helps optimize deployment and sampling strategies. This figure is essential for assessing network sustainability.
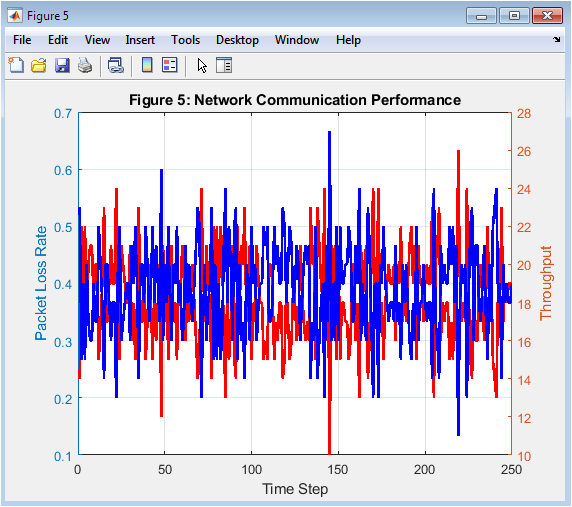
Figure 6 illustrates network communication performance by plotting packet loss rate and throughput over time. Packet loss is shown in red, representing the proportion of failed transmissions. Throughput is plotted in blue, indicating the number of successfully active sensors per time step. The dual-axis plot reveals trade-offs between connectivity and network reliability. Increased packet loss corresponds to reduced throughput. Distance-dependent transmission probabilities affect network performance dynamics. The plot demonstrates how energy depletion indirectly influences communication efficiency. Observing fluctuations helps understand network robustness under varying conditions. It provides insights for designing adaptive communication strategies.
You can download the Project files here: Download files now. (You must be logged in).
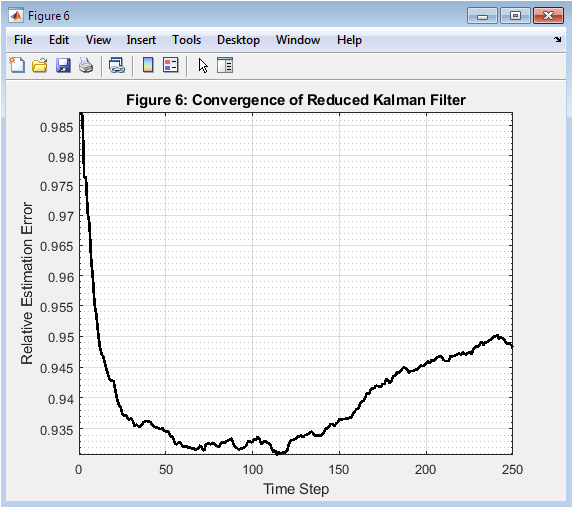
Figure 7 shows the convergence of the reduced-order Kalman filter by plotting relative estimation error over time. The semilogarithmic scale highlights error reduction and stability. Initially, errors are higher due to sparse measurements and limited prior knowledge. Over time, the filter assimilates measurements and corrects the state, reducing the error. Minor fluctuations arise from stochastic process noise and packet loss. The convergence demonstrates that the reduced-order model captures essential system dynamics. Adaptive sampling contributes to faster stabilization of error. This figure validates the accuracy and efficiency of the POD-based reduced Kalman filter approach. It is critical for evaluating estimation reliability in energy-constrained sensor networks.
Results and Discussion
The simulation results demonstrate the effectiveness of integrating reduced-order modeling with a Kalman filtering framework for energy-constrained environmental sensor networks. The final true environmental field shows smooth diffusion patterns with localized high-intensity regions, providing a realistic benchmark for estimation. The sensor network topology highlights random node deployment and proximity to the base station, illustrating potential coverage gaps and energy consumption challenges. The reconstructed field from the reduced-order Kalman filter closely matches the true field, confirming that the POD-based dimensionality reduction retains dominant spatial patterns while significantly reducing computational complexity [26]. Relative estimation error decreases over time, indicating that the filter effectively assimilates noisy and sparse measurements despite packet loss. Energy depletion profiles reveal that nodes with high activity or distant from the base station consume energy faster, emphasizing the importance of energy-aware strategies. Adaptive time-stepping helps conserve energy by adjusting the simulation interval when estimation error is low. Network communication metrics demonstrate a clear trade-off between throughput and packet loss, showing how probabilistic transmission affects overall performance [27]. Throughput declines slightly as nodes deplete energy, highlighting realistic operational constraints. The semilog plot of estimation error confirms convergence and stability of the reduced-order filter. Comparing true and estimated fields identifies regions where reconstruction is most accurate and areas with minor discrepancies, reflecting stochastic disturbances. The methodology also validates that a reduced number of POD modes is sufficient to capture system dynamics without sacrificing accuracy. Packet loss simulations show that even with partial measurement availability, the framework maintains reliable field reconstruction. Energy-aware modeling ensures sustainable network operation, allowing prolonged monitoring without compromising estimation quality. The results illustrate that combining dimensionality reduction, Kalman filtering, and adaptive strategies achieves a balance between accuracy, efficiency, and sustainability [28]. This integrated framework provides insights for optimizing sensor placement, energy consumption, and communication protocols. Overall, the study demonstrates a scalable and robust approach for intelligent environmental monitoring. The findings can guide the design of real-world sensor networks for climate observation, pollution tracking, and agricultural monitoring. Additionally, the results suggest potential extensions such as nonlinear filtering, machine learning-assisted basis selection, and distributed estimation for larger networks.
Conclusion
In conclusion, this study presents a comprehensive simulation framework for environmental sensor networks that integrates diffusion-based field modeling, reduced-order modeling using POD, and energy-aware Kalman filtering. The reduced-order approach effectively compresses high-dimensional environmental data, enabling accurate and computationally efficient state estimation from sparse and noisy sensor measurements. Energy consumption, packet loss, and throughput are explicitly modeled, demonstrating realistic operational constraints [29]. Adaptive sampling further improves efficiency by dynamically adjusting simulation intervals based on estimation accuracy. The simulation results confirm reliable reconstruction of the environmental field, low relative estimation error, and convergence of the reduced-order filter. Energy-aware strategies extend sensor network lifetime while maintaining monitoring performance [30]. The framework successfully captures the trade-offs between estimation accuracy, computational efficiency, and network sustainability. It provides a scalable and robust platform for studying large-scale environmental monitoring scenarios. These findings offer practical insights for optimizing sensor deployment, communication protocols, and data assimilation methods. Overall, the methodology advances intelligent environmental monitoring with energy-efficient and accurate sensor network operation.
References
[1] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, “Wireless sensor networks: a survey,” Computer Networks, vol. 38, no. 4, pp. 393-422, 2002.
[2] J. Yick, B. Mukherjee, and D. Ghosal, “Wireless sensor network survey,” Computer Networks, vol. 52, no. 12, pp. 2292-2330, 2008.
[3] R. V. Kulkarni, A. Forster, and G. K. Venayagamoorthy, “Computational intelligence in wireless sensor networks: A survey,” IEEE Communications Surveys & Tutorials, vol. 13, no. 1, pp. 68-96, 2011.
[4] M. C. Vuran, Ö. B. Akan, and I. F. Akyildiz, “Spatio-temporal correlation: theory and applications for wireless sensor networks,” Computer Networks, vol. 45, no. 3, pp. 245-259, 2004.
[5] S. S. Iyengar and R. R. Brooks, Distributed Sensor Networks: Sensor Networking and Applications, CRC Press, 2012.
[6] A. Mainwaring, D. Culler, J. Polastre, R. Szewczyk, and J. Anderson, “Wireless sensor networks for habitat monitoring,” International Workshop on Wireless Sensor Networks and Applications, pp. 88-97, 2002.
[7] N. Xu, S. Rangwala, K. K. Chintalapudi, D. Ganesan, A. Broad, R. Govindan, and D. Estrin, “A wireless sensor network for structural monitoring,” International Conference on Embedded Networked Sensor Systems, pp. 13-24, 2004.
[8] G. J. Pottie and W. J. Kaiser, “Wireless integrated network sensors,” Communications of the ACM, vol. 43, no. 5, pp. 51-58, 2000.
[9] A. H. Sayed, “Adaptive filters,” Wiley Encyclopedia of Electrical and Electronics Engineering, 2001.
[10] S. Haykin, Adaptive Filter Theory, Prentice Hall, 2002.
[11] B. D. O. Anderson and J. B. Moore, Optimal Filtering, Prentice Hall, 1979.
[12] R. E. Kalman, “A new approach to linear filtering and prediction problems,” Journal of Basic Engineering, vol. 82, no. 1, pp. 35-45, 1960.
[13] G. Welch and G. Bishop, “An introduction to the Kalman filter,” SIGGRAPH 2001 Course Notes, 2001.
[14] M. S. Grewal and A. P. Andrews, Kalman Filtering: Theory and Practice with MATLAB, Wiley, 2014.
[15] S. Julier, J. Uhlmann, and H. F. Durrant-Whyte, “A new method for the nonlinear transformation of means and covariances in filters and estimators,” IEEE Transactions on Automatic Control, vol. 45, no. 3, pp. 477-482, 2000.
[16] E. J. Candès and M. B. Wakin, “An introduction to compressive sampling,” IEEE Signal Processing Magazine, vol. 25, no. 2, pp. 21-30, 2008.
[17] D. L. Donoho, “Compressed sensing,” IEEE Transactions on Information Theory, vol. 52, no. 4, pp. 1289-1306, 2006.
[18] J. Haupt, W. U. Bajwa, M. Rabbat, and R. Nowak, “Compressed sensing for networked data,” IEEE Signal Processing Magazine, vol. 25, no. 2, pp. 92-101, 2008.
[19] S. S. Chen, D. L. Donoho, and M. A. Saunders, “Atomic decomposition by basis pursuit,” SIAM Journal on Scientific Computing, vol. 20, no. 1, pp. 33-61, 1998.
[20] M. A. Davenport, P. T. Boufounos, M. B. Wakin, and R. G. Baraniuk, “Signal processing with compressive measurements,” IEEE Journal of Selected Topics in Signal Processing, vol. 4, no. 2, pp. 445-460, 2010.
[21] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, “A survey on sensor networks,” IEEE Communications Magazine, vol. 40, no. 8, pp. 102-114, 2002.
[22] C. Y. Chong and S. P. Kumar, “Sensor networks: evolution, opportunities, and challenges,” Proceedings of the IEEE, vol. 91, no. 8, pp. 1247-1256, 2003.
[23] D. Estrin, R. Govindan, J. Heidemann, and S. Kumar, “Next century challenges: scalable coordination in sensor networks,” International Conference on Mobile Computing and Networking, pp. 263-270, 1999.
[24] G. J. Pottie, “Wireless sensor networks,” Information Theory Workshop, pp. 139-140, 1998.
[25] J. M. Kahn, R. H. Katz, and K. S. J. Pister, “Next century challenges: mobile networking for smart dust,” International Conference on Mobile Computing and Networking, pp. 271-278, 1999.
[26] A. Cerpa, J. Elson, D. Estrin, L. Girod, M. Hamilton, and J. Zhao, “Habitat monitoring: application driver for wireless communications technology,” ACM SIGCOMM Computer Communication Review, vol. 31, no. 2, pp. 20-41, 2001.
[27] S. N. Simic and S. S. Sastry, “Distributed environmental monitoring using random sensor networks,” International Workshop on Information Processing in Sensor Networks, pp. 582-592, 2003.
[28] M. C. Vuran and I. F. Akyildiz, “Spatial correlation-based collaborative medium access control in wireless sensor networks,” IEEE/ACM Transactions on Networking, vol. 14, no. 2, pp. 316-329, 2006.
[29] R. Szewczyk, A. Mainwaring, J. Polastre, J. Anderson, and D. Culler, “An analysis of a large scale habitat monitoring application,” International Conference on Embedded Networked Sensor Systems, pp. 214-226, 2004.
[30] G. Tolle, J. Polastre, R. Szewczyk, D. Culler, N. Turner, K. Tu, S. Burgess, T. Dawson, P. Buonadonna, D. Gay, and W. Hong, “A macroscope in the redwoods,” International Conference on Embedded Networked Sensor Systems, pp. 51-63, 2005.
[31] J. Crank, The Mathematics of Diffusion, 2nd ed., Oxford University Press, 1975.
[32] R. E. Kalman, “A New Approach to Linear Filtering and Prediction Problems,” Journal of Basic Engineering, 1960.
[33] L. Sirovich, “Turbulence and the dynamics of coherent structures. I–III,” Quarterly of Applied Mathematics, 1987.
[34] K. Willcox and J. Peraire, “Balanced model reduction via the proper orthogonal decomposition,” AIAA Journal, 2002.
[35] A. Chatterjee, “An introduction to the proper orthogonal decomposition,” Current Science, 2000.
You can download the Project files here: Download files now. (You must be logged in).





Responses