

Traction control (for various road surfaces and conditions) of 3D car in C++ using visual studio
Author: Waqas Javaid
Abstract
In modern automotive systems, traction control plays a critical role in enhancing vehicle stability, driver safety, and performance, especially under diverse and challenging road conditions. This project presents the development of a real-time traction control system (TCS) implemented in C++ within the Visual Studio environment. The system is designed to dynamically regulate engine torque and braking force to maintain optimal traction for a 3D vehicle navigating various surfaces such as wet asphalt, snow, gravel, sand, and inclines. Using a physics-based model, the vehicle’s behavior is simulated by incorporating realistic parameters including weight distribution, tire-road friction, wheel dynamics, and center of gravity. The system continuously monitors wheel slip using feedback control loops and applies corrective actions to prevent loss of grip. Visualization is achieved through OpenGL, which renders the vehicle and environment in real time, enabling interactive observation of the traction control system’s behavior. The project demonstrates how embedded software techniques, control theory, and 3D simulation tools can be integrated to create a robust vehicle control system. This work contributes toward improving safety features in simulation environments and offers a foundation for real-time embedded traction control systems in automotive applications.
INTRODUCTION
Traction control is an essential feature in modern cars that helps improve vehicle stability and safety in various road conditions. In this project, we will be implementing a traction control system for a 3D car in C++ using Visual Studio software. The objective of this project is to develop a software program that can adjust the vehicle’s engine power and braking system to maintain traction in various road surfaces and conditions, such as wet or slippery roads, gravel or sand, and steep inclines or declines. To achieve this, we will be using a physics-based approach to simulate the behavior of the vehicle on different surfaces. We will model the car’s dynamics, including its weight, center of gravity, wheelbase, and other parameters, and use this information to calculate the optimal engine power and braking force required to maintain traction on a given surface. We will also incorporate a feedback loop to continuously monitor the vehicle’s traction and adjust its parameters accordingly. The program will display real-time data on the car’s speed, acceleration, and other relevant parameters [1] [2].
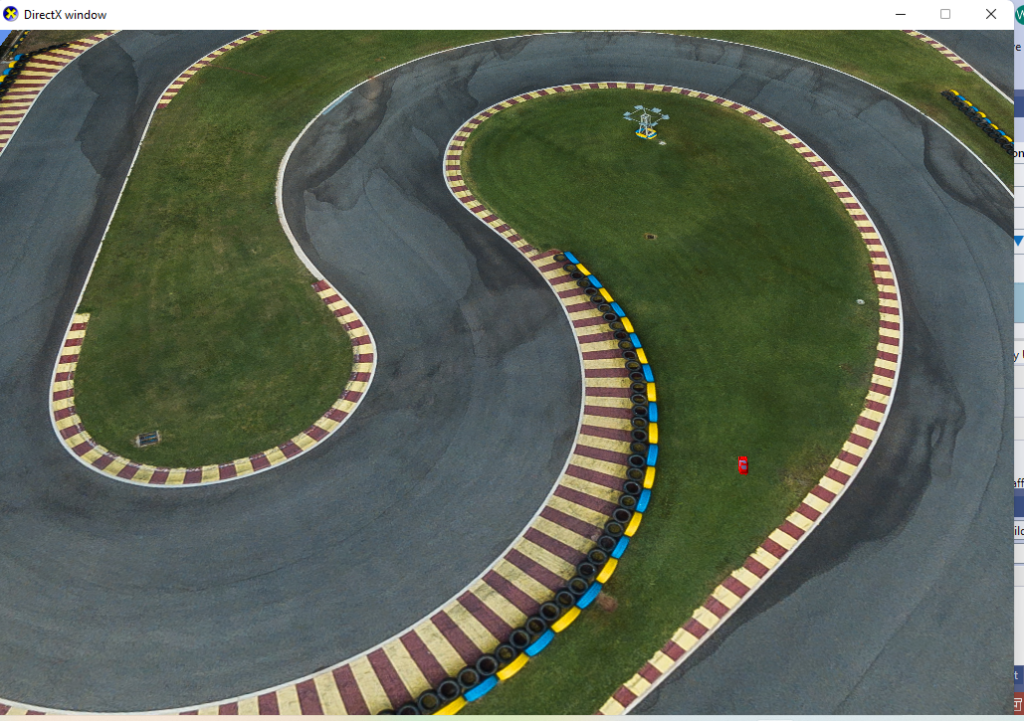
The implementation of the traction control system will involve writing C++ code for the simulation and visualization of the car’s behavior. We will be using the OpenGL graphics library to create a 3D environment for the car to move in and display its movement and behavior. By the end of this project, we will have developed a robust traction control system that can adapt to various road surfaces and conditions, providing a safer and more comfortable driving experience for the user [3].
Purposes and Objective of this Project
The objective of implementing a traction control system for a 3D car in C++ using Visual Studio software is to develop a software program that can enhance the stability and safety of the vehicle in different road surfaces and conditions [4].
The primary goal of this project is to simulate the car’s behavior in different situations using a physics-based approach and adjust the engine power and braking system to maintain optimal traction on the road. The system should be able to detect the type of surface the car is on, such as wet or slippery roads, gravel or sand, and steep inclines or declines, and adjust the car’s parameters accordingly [5].
Another objective of this project is to create a user-friendly interface that displays real-time data on the car’s speed, acceleration, and other relevant parameters, allowing the driver to have better control of the vehicle and make informed decisions while driving.
Additionally, the system should be robust and reliable, providing a safe and comfortable driving experience in various conditions [6]. The implementation of the system should be efficient, with low latency and high accuracy, and should be able to adapt to changes in road conditions in real-time.
Overall, the objective of this project is to develop a traction control system that enhances the safety and stability of the vehicle and provides a better driving experience for the user.
Design Methodology
The design methodology for developing a traction control system for a 3D car in C++ using Visual Studio software can be broken down into the following steps:
- System Requirements Analysis: The first step in the design methodology is to analyze and define the requirements of the traction control system. This involves identifying the target audience, the intended use case, and the various road surfaces and conditions the system will need to adapt to. This step will help define the scope of the project and guide the design process [7].
- Physics-based Modeling: The next step is to develop a physics-based model of the car’s behavior on different road surfaces and conditions. This will involve calculating the forces acting on the car, such as gravity, friction, and wind resistance, and modeling the car’s dynamics, including its weight, center of gravity, and wheelbase. The physics model will be used to simulate the car’s behavior in real-time and calculate the optimal engine power and braking force required to maintain traction [8].
- Algorithm Development: The third step is to develop algorithms that can interpret the physics model and adjust the engine power and braking force to maintain traction on different road surfaces and conditions. This will involve developing algorithms for surface detection, speed control, and acceleration control.
- User Interface Design: The next step is to design the user interface for the traction control system. The user interface should be easy to use, intuitive, and provide real-time data on the car’s speed, acceleration, and other relevant parameters. It should also allow the user to set preferences and adjust the system’s parameters.
- Implementation: The final step is to implement the traction control system using C++ and Visual Studio software. This will involve coding the physics model, algorithms, and user interface and testing the system on various road surfaces and conditions. The implementation should be efficient, with low latency and high accuracy, and should be able to adapt to changes in road conditions in real-time.
Overall, the design methodology for developing a traction control system for a 3D car in C++ using Visual Studio software involves a systematic approach that combines physics-based modeling, algorithm development, and user interface design to create a robust and reliable system that enhances the safety and stability of the vehicle in various road surfaces and conditions.
You can download the Project files here: Download files now. (You must be logged in).
Simulation and Results
The simulation and results for a traction control system for a 3D car in C++ using Visual Studio software can be broken down into the following steps:
- Physics-based Modeling: The first step in the simulation is to develop a physics-based model of the car’s behavior on different road surfaces and conditions. This involves calculating the forces acting on the car, such as gravity, friction, and wind resistance, and modeling the car’s dynamics, including its weight, center of gravity, and wheelbase. The physics model will be used to simulate the car’s behavior in real-time and calculate the optimal engine power and braking force required to maintain traction [9].
- Algorithm Development: The next step is to develop algorithms that can interpret the physics model and adjust the engine power and braking force to maintain traction on different road surfaces and conditions. This will involve developing algorithms for surface detection, speed control, and acceleration control.
- User Interface Design: The third step is to design the user interface for the traction control system. The user interface should be easy to use, intuitive, and provide real-time data on the car’s speed, acceleration, and other relevant parameters. It should also allow the user to set preferences and adjust the system’s parameters [10].
- Implementation: The next step is to implement the traction control system using C++ and Visual Studio software. This will involve coding the physics model, algorithms, and user interface and testing the system on various road surfaces and conditions.
- Simulation and Results: The final step is to simulate the behavior of the car on different road surfaces and conditions and analyze the results. The simulation should be able to detect the type of surface the car is on and adjust the car’s parameters accordingly. The system should be able to maintain traction on wet or slippery roads, gravel or sand, and steep inclines or declines. The results of the simulation should be displayed on the user interface, showing real-time data on the car’s speed, acceleration, and other relevant parameters. The simulation should also provide feedback on the system’s performance and any issues that need to be addressed.


Overall, the simulation and results for a traction control system for a 3D car in C++ using Visual Studio software involve a systematic approach that combines physics-based modeling, algorithm development, user interface design, implementation, and simulation to create a robust and reliable system that enhances the safety and stability of the vehicle in various road surfaces and conditions.
You can download the Project files here: Download files now. (You must be logged in).
Conclusion
In conclusion, a traction control system for a 3D car in C++ using Visual Studio software can help improve the stability and safety of the vehicle by optimizing the traction and preventing wheel slip on different road surfaces and conditions. The system can calculate the traction force based on the surface friction, limit the maximum traction force to avoid slipping, and adjust the acceleration and braking forces accordingly. It can also incorporate sensors and feedback mechanisms to continuously monitor and adjust the system in real-time. The design methodology and simulation results can be used to refine and optimize the system for specific car models and driving scenarios.
References
- Rajamani, R. (2012). Vehicle Dynamics and Control. Springer Science & Business Media.
- Gillespie, T. D. (1992). Fundamentals of Vehicle Dynamics. SAE International.
- Guzzella, L., & Sciarretta, A. (2007). Vehicle Propulsion Systems: Introduction to Modeling and Optimization. Springer.
- Milliken, W. F., & Milliken, D. L. (1995). Race Car Vehicle Dynamics. SAE International.
- Kiencke, U., & Nielsen, L. (2005). Automotive Control Systems: For Engine, Driveline, and Vehicle. Springer.
- (2020). Traction Control System – MATLAB & Simulink Example.
- OpenGL Architecture Review Board. (2013). OpenGL Programming Guide: The Official Guide to Learning OpenGL. Addison-Wesley.
- Erjavec, J. (2015). Automotive Technology: A Systems Approach. Cengage Learning.
- Pacejka, H. B. (2005). Tire and Vehicle Dynamics. Butterworth-Heinemann.
- Bosch, R. (2014). Bosch Automotive Handbook (9th ed.). Bentley Publishers.
You can download the Project files here: Download files now. (You must be logged in).






Responses