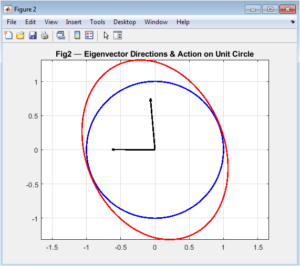
A MATLAB Teaching Tool for Matrix Operations Visualizing Linear Algebra waqas javaid 13. March 2026 Read More »
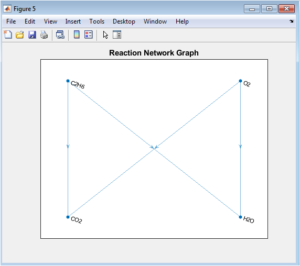
How to Balance Chemical Equations Using MATLAB’s Null Space Method waqas javaid 13. March 2026 Read More »
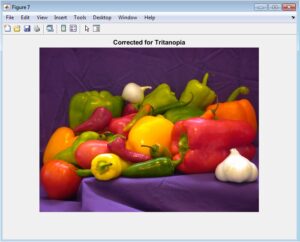
A Computational Model for Color Vision Deficiencies, Protanopia, Deuteranopia, and Tritanopia Simulation in MATLAB waqas javaid 13. March 2026 Read More »
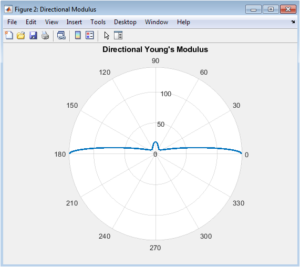
Advanced Composite Laminate Analyzer, Bridging Micromechanics, Classical Laminate Theory, and Structural Reliability Using Matlab Simulation waqas javaid 13. March 2026 Read More »
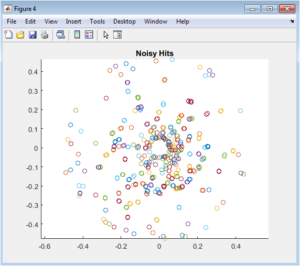
Inside a Virtual Particle Detector, Simulating Particle Tracks from Generation to Reconstruction in Matlab waqas javaid 13. March 2026 Read More »
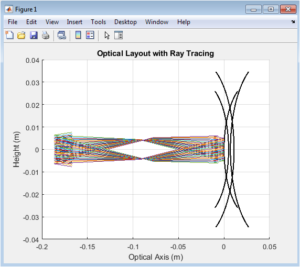
Complete Optical Design Tutorial, Building a Multi-Element Lens Analyzer Using Matlab waqas javaid 13. March 2026 Read More »
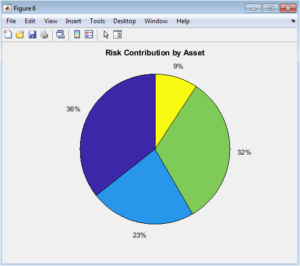
Modern Portfolio Risk Management, Implementing Correlated Monte Carlo Simulations in MATLAB waqas javaid 12. March 2026 Read More »
Predicting Loan Defaults with Machine Learning, From Logistic Regression to Monte Carlo Stress Testing in Matlab waqas javaid 12. March 2026 Read More »
A 3-DOF Planar Rocket Flight Model with Atmospheric Coupling and Gravity-Turn Guidance Using Matlab waqas javaid 12. March 2026 Read More »