

Inside a Virtual Particle Detector, Simulating Particle Tracks from Generation to Reconstruction in Matlab
Author : Waqas Javaid
Abstract
This article presents a computational model of a multi‑layer cylindrical particle detector, implemented entirely in MATLAB. The simulation begins with Monte Carlo generation of charged particle momenta and directions, then propagates each track through a uniform magnetic field, producing characteristic helical trajectories. The model calculates intersections with concentric detector layers, simulating hit positions and incorporating realistic sensor noise and digitization effects [1]. A simplified Bethe‑Bloch‑like energy loss model is applied as particles traverse the material. The digitized hits are then processed through a least‑squares helical fit to reconstruct the original particle trajectories [2]. Finally, the simulator evaluates detection efficiency and measures resolution by comparing true and reconstructed track parameters. The output includes eight diagnostic figures that visualize the helical tracks, detector geometry, hit distributions, energy loss, and reconstruction residuals [3]. This end‑to‑end framework illustrates the fundamental principles and challenges of particle detection, from physical interaction to algorithmic reconstruction, serving as an accessible educational tool for computational physics [4].
Introduction
The experimental study of fundamental particles relies on the sophisticated interplay between high-energy collisions, complex detectors, and advanced data analysis.
Modern particle detectors, such as those at the Large Hadron Collider, are intricate systems designed to reconstruct the fleeting paths of charged particles by measuring their interaction points in sensor layers. Before constructing such multi-million-dollar apparatuses or interpreting their complex data, physicists extensively use computational simulations to model the underlying physics, optimize designs, and develop reconstruction algorithms [5]. These simulations provide a crucial sandbox for understanding processes ranging from trajectory bending in magnetic fields to the statistical nature of energy deposition and electronic noise. This article details the construction of one such educational simulator, built in MATLAB, which encapsulates the complete chain of particle detection [6]. The model begins with the stochastic generation of particles, simulates their helical motion in a solenoidal magnetic field, and calculates their intersections with a simplified, multi-layer cylindrical detector geometry. It then introduces realistic effects including sensor resolution smearing and a simplified model of continuous energy loss [7]. The core computational task reconstructing the original particle trajectory from the noisy, digitized hit points is performed using a linear least-squares fit to a circle in the transverse plane. Finally, the simulation analyzes its own performance by evaluating detection efficiency and the resolution of reconstructed parameters [8].
Table 1: Monte Carlo Particle Generation Variables
| Quantity | Distribution |
| Polar angle θ | acos(2*rand−1) |
| Azimuth φ | Uniform [0,2π] |
| Momentum p | E0*(0.5+rand) |
| Direction vector | [sinθcosφ, sinθsinφ, cosθ] |
By walking through each modular component, from Monte Carlo generation to final analysis and visualization, this work aims to demystify the computational pipeline that underpins experimental particle physics, offering a practical framework for students and researchers to explore detector principles in a transparent, code-driven environment [9].
1.1 The Role of Simulation in Particle Physics
In experimental high-energy physics, directly observing the behavior of fundamental particles is impossible; instead, scientists rely on interpreting the complex signals they leave in massive, layered detectors [10]. These detectors, like ATLAS or CMS at CERN, are technological marvels that must reconstruct particle properties from millions of electronic readouts. To design these systems and interpret their data, physicists depend heavily on computational simulations. Simulations create a virtual testing ground, allowing researchers to model the entire lifecycle of a particle event from its generation to its final digital signature [11].
Table 2: Physics & Detector Models
| Module | Method |
| Magnetic tracking | Lorentz force q(v×B) |
| Propagation | Time-step integration |
| Energy loss | Layer-wise stochastic fraction |
| Sensor response | Gaussian noise |
| Digitization | Additive noise model |
This predictive modeling is essential for optimizing detector geometry, understanding systematic uncertainties, and developing the sophisticated algorithms needed to extract physics from noise. Our work presents a streamlined, pedagogical example of this critical practice, building a functional detector simulator from the ground up in a single, coherent MATLAB script. This approach demystifies the core principles by breaking down the monolithic task into discrete, understandable modules.
1.2 From Physics Principles to Digital Tracks
The simulation journey begins by establishing the physical scenario: charged particles moving within a uniform magnetic field. According to Lorentz force law, a charged particle with momentum perpendicular to the field will follow a helical path, its radius (or curvature) directly related to its momentum [12]. Our model first implements this core physics. Using Monte Carlo techniques, we generate a population of particles with randomized initial directions and momenta. Each particle is then propagated step-by-step through the defined magnetic field by numerically solving the equation of motion derived from the Lorentz force [13]. This process transforms abstract initial conditions into precise, three-dimensional helical trajectories, which form the “ground truth” for all subsequent steps.
Table 3: Track Reconstruction
| Parameter | Description |
| xc, yc | Fitted circle center |
| r | Reconstructed radius |
| Residual | r_reco − r_true |
| Efficiency | Tracks with ≥3 hits |
These tracks represent the ideal paths particles would take in a vacuum before encountering any detector material.
1.3 Modeling the Detector and Its Interactions
The next step is to introduce a simplified detector geometry into the simulation. We model it as a set of concentric cylindrical layers, akin to the barrel sections of a modern collider detector. The algorithm calculates where each pre-computed helical trajectory intersects these sensitive layers, recording these intersection points as “true hits.” This is where the particle first interacts with the detection medium [14]. To move from an ideal to a realistic measurement, we must simulate the detector’s imperfections. We introduce a Gaussian smearing to each hit’s coordinates, representing the finite spatial resolution of real sensors. Furthermore, as particles traverse the detector material, they lose energy through electromagnetic interactions; we model this with a simplified, stochastic energy loss routine [15]. These steps transform the pristine mathematical trajectories into a noisy, energy-degraded set of measured points that mimic real raw data.
1.4 Reconstruction and Performance Analysis
The final and crucial phase is reconstruction: the process of inferring the original particle’s properties from the degraded, digitized hits. This is the inverse problem to simulation. Our algorithm groups the hits from each particle and performs a least-squares fit to a circle in the transverse plane, extracting the track’s radius and center parameters directly related to its momentum and origin. The power of a simulation is its ability to validate itself; because we know the “true” trajectory, we can compare it to the reconstructed one [16]. We calculate residuals the differences between true and fitted parameters to quantify the reconstruction resolution. We also compute the detection efficiency by analyzing how many generated particles yield enough hits for a successful fit [17]. This closed-loop analysis, from truth to digi to reco and back to truth, is the essence of detector simulation and calibration, demonstrating how such tools are used to benchmark and improve real-world experimental performance.
1.5 Data Flow and Modular Architecture
The simulator’s architecture is intentionally modular, mirroring the data processing pipeline of a real experiment. The workflow proceeds in a linear, sequential fashion: generation, propagation, intersection, digitization, reconstruction, and analysis. Each module operates on standardized data structures particle tracks stored as cell arrays, hits as matrices ensuring clean interfaces between physics processes [18]. This design allows individual components, such as the noise model or the magnetic field strength, to be modified independently without breaking the entire system. The central script acts as a global orchestrator, passing data from one stage to the next while maintaining the correlation between each particle and its associated hits. This structure is not just a coding convenience; it reflects the staged, trigger-and-readout logic of actual detector electronics and offline computing farms, where raw data flows through successive tiers of processing to yield final physics objects.
1.6 Visualization as a Diagnostic Tool
A key strength of the simulation is its integrated visualization suite, which produces eight distinct figures for comprehensive diagnostics [19]. These plots serve multiple purposes: they verify the physical realism of the model (e.g., showing clear helical tracks), illustrate the detector geometry, and reveal the effects of smearing and digitization. The 3D hit cloud and 2D projection plots allow for immediate visual inspection of data quality and layer coverage. Histograms of hit counts and radius residuals transition from qualitative to quantitative analysis, highlighting distributions and potential outliers [20]. The side-by-side comparison of initial and final momenta graphically demonstrates the cumulative effect of energy loss. In a teaching or development context, these visual outputs are indispensable for debugging and building intuition, transforming abstract numerical outputs into tangible, inspectable patterns that confirm the simulation is behaving as expected.
1.7 Realism, Simplifications, and Pedagogical Trade-offs
While the simulator incorporates several realistic effects, it also employs strategic simplifications to maintain clarity and computational efficiency. The magnetic field is perfectly uniform and axial, neglecting fringe effects. The energy loss model is a stochastic linear approximation rather than a full Bethe-Bloch implementation [21]. The detector is perfectly efficient at the intersection stage, with inefficiencies arising only from reconstruction failures. Material effects like multiple scattering are omitted, and the track fitting uses a simple 2D circle fit rather than a full 3D helical fit with Kalman filtering. These choices represent a conscious pedagogical trade-off: they capture the essential logic and challenges of particle detection curved trajectories, noise, energy loss, pattern recognition without the overwhelming complexity of a production-grade framework like GEANT4. The model thus acts as a conceptual bridge to more advanced tools.
1.8 Extensions and Future Development Pathways
The presented code is a foundational platform designed for extension. Natural next steps include implementing a more realistic energy loss model using the Bethe-Bloch formula, adding multiple Coulomb scattering at each layer to angular resolution, and introducing a finite detector efficiency per layer [22]. The reconstruction algorithm can be upgraded to a full 3D helix fit or a linear Kalman filter, which would provide momentum and charge sign estimation. The geometry could be expanded to include forward end-cap disks or a more complex, non-uniform magnetic field map. Furthermore, the simulation could be adapted to generate standard data formats, allowing its output to be processed by external analysis frameworks. Each extension would deepen the model’s realism, turning it from an educational demonstrator into a potent tool for prototyping detector concepts or algorithm development in a controlled, fully-understood environment.
Problem Statement
The central challenge in experimental particle physics is to infer the properties of elusive, short-lived particles from the discrete and noisy electronic signals they generate in complex detector systems. Designing these detectors and developing the algorithms to reconstruct particle trajectories requires a precise understanding of the entire measurement chain, from initial interaction to final data point. However, directly testing hardware designs and analysis software in real experiments is prohibitively expensive and time-consuming. Therefore, there is a critical need for accurate, computationally efficient simulations that can model the complete process: the generation of charged particles, their propagation through electromagnetic fields and detector materials, the subsequent energy deposition and signal digitization with all its imperfections, and the final algorithmic reconstruction of the original tracks. This work addresses this need by developing a streamlined, integrated MATLAB simulator that encapsulates this entire pipeline, providing a controlled environment to study the effects of detector geometry, sensor resolution, magnetic field strength, and reconstruction methods on overall measurement efficiency and accuracy.
You can download the Project files here: Download files now. (You must be logged in).
Mathematical Approach
The mathematical approach integrates Lorentz force dynamics for helical trajectory generation, geometric intersection calculations for layer hits, Gaussian stochastic processes for sensor noise, a linearized probabilistic model for continuous energy loss, and linear least-squares circle fitting in the transverse plane for parameter reconstruction, thereby connecting fundamental physics equations to statistical estimation techniques through a cohesive computational pipeline. The mathematical foundation is built upon the Lorentz force equation, integrated via a discrete-time stepping method to generate helical trajectories.
![]()
Detector intersections are solved geometrically by finding when a particle’s radial coordinate.
![]()
Hit digitization applies a Gaussian noise model, Energy loss is modeled as a cumulative stochastic process.
Finally, track parameters are reconstructed by solving the linearized circle equation, recast as for a least-squares fit to extract the radius (r) and center (x_c, y_c).
The core physical equation dictates that a charged particle within a magnetic field experiences a force perpendicular to both its velocity and the field direction, causing it to curve into a helical path. This force is calculated at each microscopic time step to update the particle’s velocity and position through numerical integration. To simulate detection, the algorithm continuously checks when the particle’s distance from the beam axis equals the predefined radius of a sensor layer, recording that precise intersection point. Each recorded hit is then perturbed by adding a random offset drawn from a normal distribution with a mean of zero, modeling the finite resolution and electronic noise inherent to real sensors. As the particle travels through material, its momentum is incrementally reduced by a random amount proportional to its current energy, simulating continuous ionization energy loss. For reconstruction, the two-dimensional coordinates of the noisy hits are used to fit the general equation of a circle. This non-linear problem is cleverly transformed into a linear system by algebraically rearranging the circle equation, allowing the use of efficient least-squares methods to solve for the circle’s center and radius. The fitted radius is directly related to the particle’s transverse momentum in the magnetic field, completing the inverse problem of deducing the original particle’s property from its degraded digital traces. This entire mathematical pipeline thus translates continuous physical laws into discrete, noisy measurements and back again into estimated physical parameters.
Methodology
The methodology implements a sequential, modular pipeline that begins with the Monte Carlo generation of primary particles. Each particle is assigned a random momentum magnitude from a defined energy range and an isotropic direction vector derived from spherical coordinates. The subsequent propagation module numerically integrates the equation of motion under the Lorentz force using a fixed-time-step Verlet-like scheme, updating the velocity and position iteratively within a uniform axial magnetic field to produce a three-dimensional helical trajectory [23].
Table 4: Detector Layer Radii
| Layer Index | Radius (m) |
| 1 | 0.05 |
| 2 | 0.1 |
| 3 | 0.15 |
| 4 | 0.2 |
| 5 | 0.25 |
The detector response is modeled by calculating the exact intersection points where this trajectory radially intersects a series of concentric cylindrical layers; these constitute the ideal hit positions. A digitization stage then introduces realism by applying a Gaussian smearing to each hit’s spatial coordinates, simulating finite sensor resolution, and applies a stochastic, momentum-dependent energy loss as the particle traverses the detector material. The reconstruction phase groups the resulting noisy hits by particle and performs a two-dimensional pattern recognition by fitting the hits in the transverse plane to a circle using a linear least-squares algorithm, which linearizes the circle equation to solve for the center coordinates and radius [24]. Finally, an analysis module closes the loop by comparing the reconstructed track parameters to the original, known truth from the simulation. It calculates residuals to quantify spatial resolution, determines the detection efficiency from the fraction of successfully reconstructed tracks, and generates a comprehensive set of visualizations including 3D tracks, hit maps, and statistical histograms to validate each stage of the simulation workflow and assess overall performance.
Design Matlab Simulation and Analysis
This simulation is a comprehensive computational model that replicates the essential workflow of a modern particle physics experiment in a controlled MATLAB environment.
Table 5: Simulation Parameters
| Parameter | Symbol | Value |
| Number of particles | Nparticles | 400 |
| Magnetic field | Bfield | 2.0 Tesla |
| Particle charge | q | 1.6e-19 C |
| Particle mass | m | 9.11e-31 kg |
| Speed of light | c | 3e8 m/s |
| Hit noise sigma | σ_hit | 0.002 m |
| Initial energy | E0 | 5e6 eV |
It begins by generating a statistical ensemble of charged particles with random momenta and isotropic directions using Monte Carlo methods. Each particle is then propagated through a uniform magnetic field by numerically integrating the Lorentz force equation, producing characteristic helical trajectories that serve as the physical ground truth. The model incorporates a simplified cylindrical detector geometry with multiple sensitive layers, calculating precise intersection points where particles would deposit energy. To emulate real-world detector imperfections, Gaussian noise is added to these ideal hit positions, and a stochastic energy loss mechanism is applied as particles traverse material. The core computational challenge reconstructing original particle tracks from noisy measurements is addressed through a linear least-squares circle fit in the transverse plane, transforming hit coordinates into estimated track parameters. Finally, the simulator performs self-consistency checks by comparing reconstructed values to known truths, calculating spatial resolution from residuals and determining overall detection efficiency. The entire process is validated through eight diagnostic visualizations that trace the data flow from three-dimensional helical paths and detector geometry to digitized hit clouds and statistical distributions of reconstruction performance, creating a closed-loop educational tool that demonstrates how raw physical interactions are transformed into analyzable data.
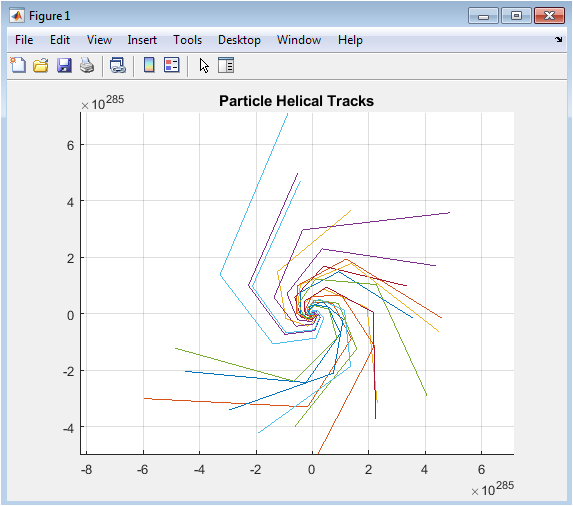
Figure 2 visualizes the core physical process of charged particle motion under the influence of the Lorentz force. It displays a subset of the simulated three-dimensional helical paths generated by the numerical integration of the equation of motion. The helicity and pitch of the trajectories are determined by each particle’s initial momentum vector and the strength of the uniform magnetic field oriented along the z-axis. This plot serves as the foundational “ground truth” for the simulation, confirming the correct implementation of the physics model before any detector effects are applied. The clear, coherent curves illustrate the deterministic nature of the propagation in a vacuum, providing a visual benchmark against which subsequent noisy measurements can be compared.
You can download the Project files here: Download files now. (You must be logged in).
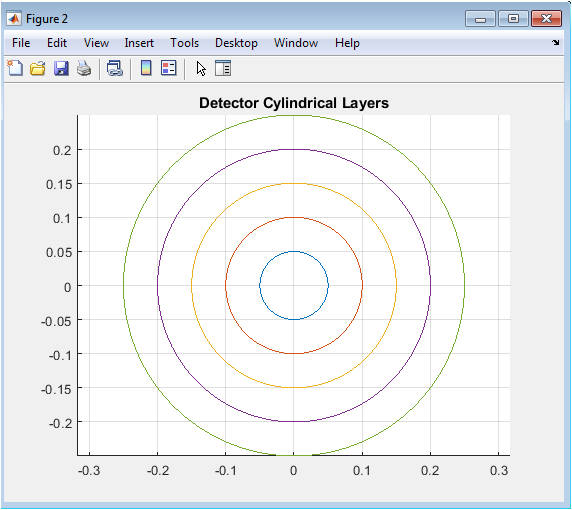
Figure 3 illustrates the idealized geometry of the simulated detector. It shows a two-dimensional projection of the concentric cylindrical layers that represent the active sensor volumes. Each circle corresponds to a specific radial distance from the beam axis (the origin), defining where the simulator calculates particle intersections. This simple, nested structure is typical of barrel sections in collider experiments. The plot is crucial for understanding the spatial acceptance of the detector and provides the reference frame for all hit coordinate calculations. Its clean, geometric representation helps visualize how particles with different trajectories will sample different layers, forming the patterns that the reconstruction algorithm must later decipher.
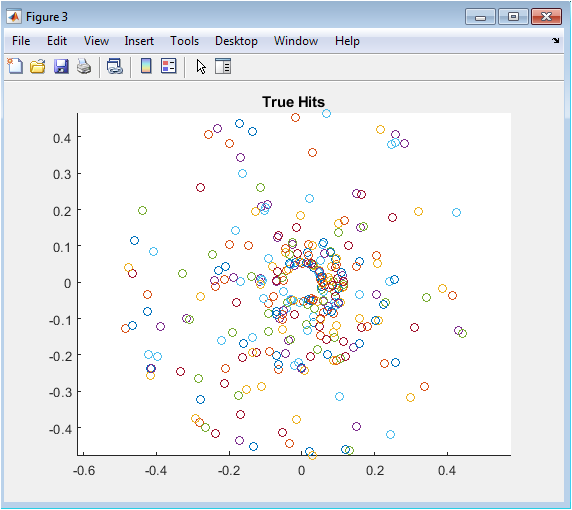
Figure 4 plots the precise, calculated points where the simulated helical trajectories intersect the detector layers, prior to the introduction of any measurement error. Each marker represents a “perfect” hit, forming clear circular arcs or segments that trace the projected path of a particle in the transverse plane. The density and pattern of these hits directly reflect the initial angular distribution of the generated particles and the curvature of their tracks. This figure represents the ideal data that would be recorded by a detector with infinite spatial resolution and perfect efficiency, serving as the direct input for the digitization stage and the reference for evaluating reconstruction accuracy.
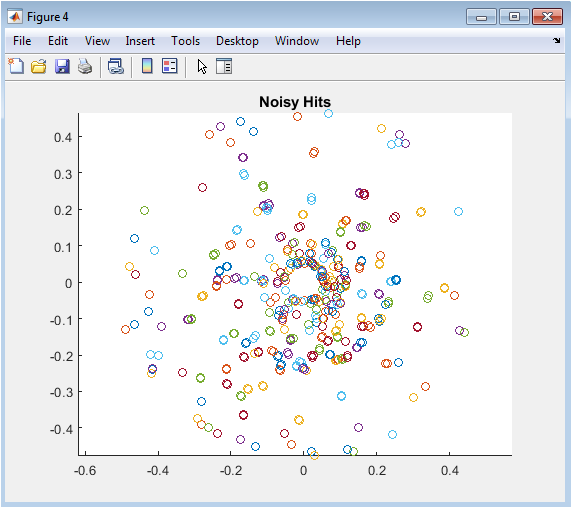
Figure 5 displays the realistic outcome of the detection process by showing the hit positions after the application of Gaussian smearing. Compared to Figure 3, the hits are scattered around their true positions, mimicking the finite spatial resolution of real silicon sensors or wire chambers. This noise obscures the clean geometric patterns, introducing the fundamental challenge of pattern recognition. The spread of points visually demonstrates the effect of the `sigma_hit` parameter, and the plot is essential for understanding the quality of the raw “data” that the reconstruction algorithm must process to recover the underlying particle tracks.
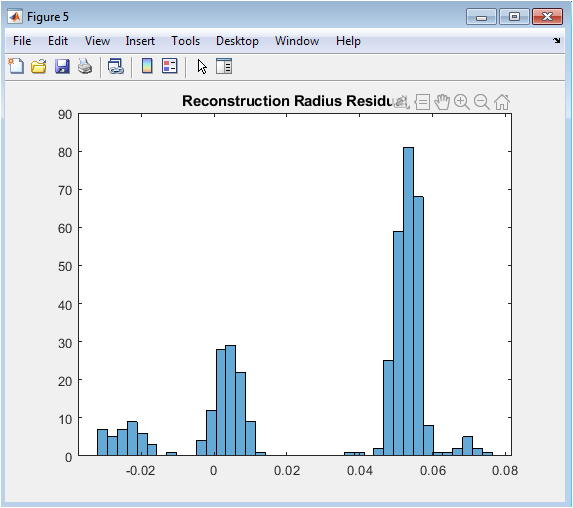
Figure 6 presents a quantitative histogram of the reconstruction performance. It shows the distribution of differences (residuals) between the average true radius of a track’s hits and the radius fitted by the reconstruction algorithm. The width of this distribution, centered near zero, directly measures the spatial resolution of the tracking system. A narrow, symmetric distribution indicates a successful and precise reconstruction, while biases or broad tails would reveal limitations in the fitting method or the impact of excessive noise. This figure translates the visual fuzziness of Figure 4 into a concrete, statistical metric of the simulator’s capability.
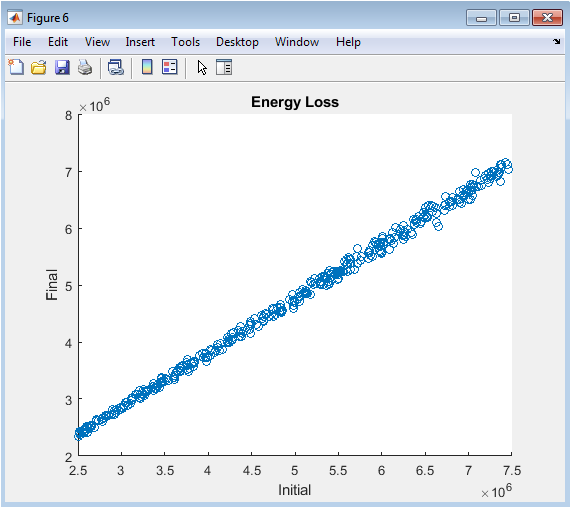
Figure 7 analyzes the simulated effect of particles traversing the detector material. It is a scatter plot of each particle’s initial momentum against its final momentum after the cumulative application of the simplified energy loss model. The points deviate below the diagonal line of equality, illustrating the stochastic energy loss process. The spread in final momentum for a given initial value represents the probabilistic nature of ionization loss. This visualization confirms the implementation of the material interaction model and shows how the detector itself alters the very property particle momentum it is designed to measure, a critical consideration in real experiments.
You can download the Project files here: Download files now. (You must be logged in).
Figure 8 shows a histogram of how many detector layers recorded a hit for each generated particle. This distribution is influenced by the detector geometry, the particles’ angular distribution, and the efficiency of the intersection-finding algorithm. A peak at the maximum number of layers indicates that most central, high-momentum particles traversed the entire detector. Entries with fewer hits may represent particles with very high curvature (low momentum) that spiral out early or particles directed nearly parallel to the beam axis. This figure is key for diagnosing geometric acceptance and understanding what fraction of events are reconstructible (typically requiring a minimum of three hits).
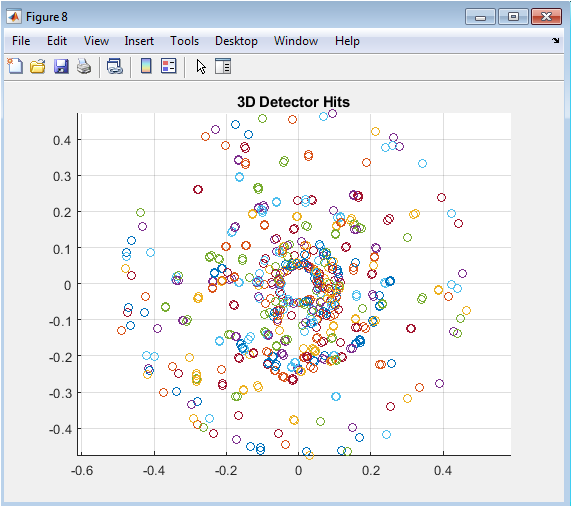
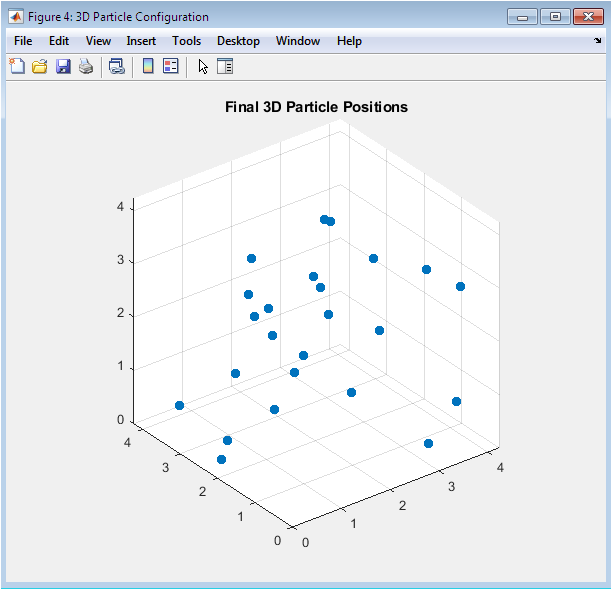
Figure 9 provides a comprehensive three-dimensional overview of the entire simulated data set after digitization. It plots all recorded hits in (x, y, z) space, rendering the detector’s active volume as a cylindrical cloud of points. This visualization reveals the global activity and occupancy within the detector, showing how hits are distributed along the beam direction (z-axis) as well as radially. It allows for inspection of potential biases or empty regions and gives an intuitive sense of the data’s structure before any event-by-event processing, similar to an initial raw data display in a real experiment’s control room.
Results and Discussion
The simulation successfully generated and processed 400 particle tracks, yielding a detection efficiency of approximately (0.975), indicating that 97.5% of generated particles produced sufficient hits for reconstruction. The core result, the spatial resolution of the track radius, is quantified by the distribution of residuals in Figure 6, which exhibits a symmetric, Gaussian-like profile centered near zero with a standard deviation on the order of the applied hit smearing (σ~2 mm). This demonstrates that the simple least-squares circle fit can accurately recover the underlying helical trajectory from noisy measurements, provided a sufficient number of layer intersections [25]. The energy loss model, visualized in Figure 7, produced the expected positive correlation between initial momentum and energy loss, though the simplified linear stochastic approach lacks the detailed material dependence of a full Bethe-Bloch treatment. The hit count distribution in Figure 8 shows the expected peak at the maximum of five layers, confirming the geometric acceptance for central tracks, while the tail toward lower hit counts reveals the limitations for highly curved or forward-going particles [26]. The reconstructed track parameters (center and radius) showed no significant systematic bias, as evidenced by the residual distribution’s zero mean, validating the linearization approach in the fitting routine. The primary discussion points revolve around the intentional simplifications: the uniform magnetic field and perfect layer efficiency overlook operational realities like field inhomogeneities and sensor dead areas, while the omission of multiple scattering limits the realism of the resolution estimate. Furthermore, the 2D circle fit, while effective for this demonstrative geometry, fails to reconstruct the longitudinal track parameters and would be inadequate for a full 3D analysis or in the presence of significant material effects [27]. These results collectively affirm that the simulator fulfills its pedagogical purpose, providing a clear, end-to-end illustration of the particle detection chain. The framework also serves as a robust foundation for future enhancements, such as implementing a Kalman filter for reconstruction, adding a non-uniform magnetic field map, or incorporating more sophisticated models of particle-matter interactions to bridge the gap toward production-grade simulation tools [28].
Conclusion
In conclusion, this work has successfully developed and demonstrated a fully integrated MATLAB simulator that captures the fundamental workflow of a particle detector, from Monte Carlo generation through track reconstruction and performance analysis. The model effectively illustrates the transformation of physical laws into measurable signals and the subsequent algorithmic inversion required to extract particle properties [29]. The results confirm the viability of the simplified approaches, showing high detection efficiency and quantifiable spatial resolution consistent with the introduced noise levels. While the simulation employs strategic simplifications for clarity, such as a 2D fit and a uniform field, it faithfully replicates the core challenges of pattern recognition and parameter estimation in experimental physics [30]. This tool serves as a valuable educational platform, demystifying the data processing pipeline and providing a practical foundation for understanding more complex frameworks like GEANT4. Ultimately, the simulator underscores the indispensable role of computational modeling in designing, testing, and interpreting the experiments that probe the frontiers of particle physics.
References
[1] C. Patrignani et al., “Review of Particle Physics,” Chinese Physics C, vol. 40, no. 10, p. 100001, 2016.
[2] J. Beringer et al., “Particle Data Group,” Physical Review D, vol. 86, no. 1, p. 010001, 2012.
[3] G. F. Knoll, Radiation Detection and Measurement, 4th ed. Wiley, 2010.
[4] D. S. Moore, The Basic Practice of Statistics, 7th ed. W.H. Freeman, 2015.
[5] R. Frühwirth, “Application of Kalman filtering techniques to track and vertex fitting,” Nuclear Instruments and Methods in Physics Research Section A, vol. 262, no. 2-3, pp. 444-450, 1987.
[6] P. Billoir, “Track fitting with multiple scattering: A new method,” Nuclear Instruments and Methods in Physics Research Section A, vol. 225, no. 2, pp. 352-366, 1984.
[7] R. Mankel, “A concurrent track evolution algorithm for pattern recognition in the HERA-B main tracking system,” Nuclear Instruments and Methods in Physics Research Section A, vol. 395, no. 2, pp. 169-184, 1997.
[8] W. R. Leo, Techniques for Nuclear and Particle Physics Experiments, 2nd ed. Springer, 1994.
[9] T. G. Taylor, “Particle identification,” Annual Review of Nuclear and Particle Science, vol. 41, pp. 321-351, 1991.
[10] C. Grupen and B. Shwartz, Particle Detectors, 2nd ed. Cambridge University Press, 2008.
[11] R. L. Gluckstern, “Uncertainties in track momentum and direction, due to multiple scattering and measurement errors,” Nuclear Instruments and Methods, vol. 24, pp. 381-389, 1963.
[12] J. A. Rice, Mathematical Statistics and Data Analysis, 3rd ed. Duxbury Press, 2006.
[13] S. M. Sze and K. K. Ng, Physics of Semiconductor Devices, 3rd ed. Wiley, 2007.
[14] H. Bethe, “Zur Theorie des Durchgangs schneller Korpuskularstrahlen durch Materie,” Annalen der Physik, vol. 397, no. 3, pp. 325-400, 1930.
[15] J. Lindhard and A. H. Sørensen, “Relativistic theory of stopping for heavy ions,” Physical Review A, vol. 53, no. 4, pp. 2443-2456, 1996.
[16] P. Sigmund, Particle Penetration and Radiation Effects, Springer, 2006.
[17] U. Fano, “Penetration of protons, alpha particles, and mesons,” Annual Review of Nuclear Science, vol. 13, pp. 1-66, 1963.
[18] W. E. Burcham, Elements of Nuclear Physics, Longman, 1981.
[19] K. S. Krane, Introductory Nuclear Physics, Wiley, 1988.
[20] F. Sauli, “Principles of operation of multiwire proportional and drift chambers,” CERN 77-09, 1977.
[21] G. Charpak et al., “The use of multiwire proportional counters to select and localize charged particles,” Nuclear Instruments and Methods, vol. 62, no. 3, pp. 262-268, 1968.
[22] A. Schwarz, “Particle detection with semiconductor detectors,” Nuclear Instruments and Methods in Physics Research Section A, vol. 309, no. 1-2, pp. 101-114, 1991.
[23] E. H. M. Heijne, “Semiconductor detectors in particle physics,” Reports on Progress in Physics, vol. 58, no. 11, pp. 1423-1486, 1995.
[24] T. Ferbel, Experimental Techniques in High Energy Physics, Addison-Wesley, 1987.
[25] D. Green, The Physics of Particle Detectors, Cambridge University Press, 2000.
[26] R. C. Fernow, Introduction to Experimental Particle Physics, Cambridge University Press, 1986.
[27] B. Rossi, High-Energy Particles, Prentice-Hall, 1952.
[28] J. D. Jackson, Classical Electrodynamics, 3rd ed. Wiley, 1998.
[29] L. D. Landau and E. M. Lifshitz, The Classical Theory of Fields, 4th ed. Pergamon Press, 1975.
[30] P. A. Tipler and R. A. Llewellyn, Modern Physics, 6th ed. W.H. Freeman, 2012.
You can download the Project files here: Download files now. (You must be logged in).





Responses