

Nonlinear Formation Control of Drone Swarms with Collision Avoidance using Matlab
Author : Waqas Javaid
Abstract
This paper presents a nonlinear formation control approach for drone swarms with collision avoidance. The proposed method utilizes a Lorenz-type chaotic dynamics model to simulate the behavior of individual drones. A consensus-based control algorithm is designed to achieve formation flying, while a repulsive force is incorporated to prevent collisions between drones. Multi-robot formation control has been an active research area due to its applications in surveillance, exploration, and cooperative transportation [1]. The stability of the closed-loop system is analyzed using Lyapunov theory. Simulation results demonstrate the effectiveness of the proposed approach in achieving formation flying and collision avoidance. The approach is scalable and can be applied to large-scale drone swarms. Early studies established geometric and behavior-based strategies for maintaining formations among multiple mobile robots [2]. The paper also presents a bifurcation analysis of the drone swarm dynamics. The results show that the proposed approach can achieve stable formation flying even in the presence of uncertainties and disturbances. Consensus-based control frameworks were later introduced to guarantee coordinated motion in networks of agents under switching topologies and communication delays [3]. The approach has potential applications in various fields, including surveillance, search and rescue, and environmental monitoring.
Introduction
The rapid advancement in drone technology has led to a growing interest in the deployment of drone swarms for various applications, including surveillance, search and rescue, and environmental monitoring. Drone swarms offer several advantages over single-drone systems, including increased coverage, improved robustness, and enhanced flexibility. However, controlling a swarm of drones is a challenging task, requiring sophisticated algorithms and control strategies to achieve stable and coordinated behavior. One of the key challenges in drone swarm control is formation flying, where multiple drones are required to maintain a specific geometric configuration while avoiding collisions.

In this paper, we propose a nonlinear formation control approach for drone swarms with collision avoidance. Consensus-based control frameworks were later introduced to guarantee coordinated motion in networks of agents under switching topologies and communication delays [4]. Our approach utilizes a Lorenz-type chaotic dynamics model to simulate the behavior of individual drones, and a consensus-based control algorithm to achieve formation flying. The proposed approach is scalable and can be applied to large-scale drone swarms. We also present a bifurcation analysis of the drone swarm dynamics to demonstrate the stability and robustness of the proposed approach. The effectiveness of the proposed approach is demonstrated through simulation results, which show that the drone swarm can achieve stable formation flying and collision avoidance. The stability properties of swarm systems with asynchronous updates and limited information exchange were rigorously analyzed using Lyapunov-based methods [5]. The proposed approach has potential applications in various fields, including surveillance, search and rescue, and environmental monitoring.
1.1 Drone Swarms
The rapid advancement in drone technology has led to a growing interest in the deployment of drone swarms for various applications.
Drone swarms offer several advantages over single-drone systems, including increased coverage, improved robustness, and enhanced flexibility. Drone swarms can be used for surveillance, search and rescue, and environmental monitoring. The use of drone swarms can reduce the risk of human life in hazardous environments. Drone swarms can also be used for large-scale data collection and processing. The deployment of drone swarms requires sophisticated algorithms and control strategies. The stability properties of swarm systems with asynchronous updates and limited information exchange were rigorously analyzed using Lyapunov-based methods [6]. The control of drone swarms is a challenging task due to the complexity of the system. The drone swarm system is a multi-agent system, where each drone is an agent. The agents must work together to achieve a common goal.
1.2 Challenges in Drone Swarm Control
One of the key challenges in drone swarm control is formation flying. Formation flying requires multiple drones to maintain a specific geometric configuration while avoiding collisions. The drones must communicate with each other to achieve formation flying. The communication between drones can be wireless or wired.
Table 1: Control Gains
Gain | Symbol | Value | Function |
Position gain | k_pos | 2 | Formation cohesion |
Repulsion gain | k_rep | 10 | Collision avoidance |
The drones must also be able to sense their environment and adjust their position accordingly. The control algorithm must be able to handle uncertainties and disturbances. Collective motion phenomena such as flocking and phase transitions in self-driven particle systems inspired many decentralized coordination algorithms for multi-agent systems [7]. The drone swarm system is a nonlinear system, making it challenging to control. The control algorithm must be able to handle the nonlinearity of the system. The drone swarm system is also a high-dimensional system, making it challenging to control.
1.3 Stability Analysis
The stability of the proposed approach is analyzed using Lyapunov theory. The Lyapunov function is used to prove the stability of the closed-loop system. The stability analysis reveals that the proposed approach is asymptotically stable. A comprehensive theoretical framework for flocking behavior in multi-agent dynamical systems was developed, providing conditions for velocity alignment and collision avoidance [8]. The stability analysis also reveals that the proposed approach is robust to uncertainties and disturbances.
1.4 Comparison with Existing Approaches
The proposed approach is compared with existing approaches to drone swarm control. The comparison reveals that the proposed approach has several advantages over existing approaches, including scalability, robustness, and adaptability. The effects of fixed and switching interaction networks on flocking stability were investigated, demonstrating robustness against topology variations [9]. The proposed approach is also compared with existing approaches in terms of computational complexity and communication requirements.
Problem Statement
The problem of drone swarm control is a challenging task that involves controlling multiple drones to achieve a common goal, such as formation flying or search and rescue. The drones must communicate with each other and adjust their position to maintain a specific geometric configuration while avoiding collisions. The problem is complicated by the presence of uncertainties and disturbances, such as wind or obstacles, that can affect the drones’ behavior. Existing approaches to drone swarm control have limitations in terms of scalability, robustness, and adaptability. A novel approach is needed to address these limitations and achieve stable and efficient drone swarm control. The approach must be able to handle nonlinear dynamics and uncertainties, and must be scalable to large numbers of drones. The approach must also be able to adapt to changing environments and requirements. The problem requires the development of a distributed nonlinear formation control algorithm with collision avoidance. The algorithm must be able to handle the complexities of drone swarm control and achieve stable and efficient performance. The development of such an algorithm is a challenging task that requires advanced control techniques and algorithms.
Mathematical Approach
The mathematical approach to solving the problem of drone swarm control involves modeling the dynamics of the drones using nonlinear differential equations. The drones are assumed to be point masses with position and velocity vectors, and the dynamics are modeled using the Lorenz-type chaotic dynamics model. The control objective is to design a distributed nonlinear formation control algorithm that achieves stable formation flying and collision avoidance. The algorithm is based on the consensus-based control approach, where each drone communicates with its neighbors and adjusts its position to achieve a common goal. The algorithm also includes a repulsive force term to prevent collisions between drones. Consensus strategies for cooperative vehicle formations were extended to address practical control challenges such as scalability and limited communication [10]. The stability of the closed-loop system is analyzed using Lyapunov theory, and the algorithm is shown to be asymptotically stable. The mathematical approach involves solving a set of nonlinear differential equations that describe the dynamics of the drones and the control algorithm. The solution is obtained using numerical methods, such as the Runge-Kutta method. The mathematical approach provides a rigorous framework for analyzing and designing the drone swarm control system. The approach is scalable and can be applied to large numbers of drones. The mathematical approach also provides insights into the behavior of the drone swarm and can be used to predict the performance of the system. The approach is based on the assumption that the drones are identical and have the same dynamics. Distributed tracking control with time-varying reference signals enabled coordinated motion while reducing communication burden among agents [11]. The approach can be extended to handle non-identical drones and more complex scenarios. The mathematical approach is a powerful tool for designing and analyzing drone swarm control systems. It provides a rigorous framework for evaluating the performance of the system and can be used to optimize the design of the control algorithm. The mathematical approach to solving the problem of drone swarm control involves modeling the dynamics of the drones using nonlinear differential equations. The drones are assumed to be point masses with position and velocity vectors, and the dynamics are modeled using the Lorenz-type chaotic dynamics model:
dx/dt = σ(y – x)
dy/dt = x(r – z) – y
dz/dt = xy – bz
Where x, y, and z are the position coordinates of the drone, and σ, r, and b are parameters that determine the behavior of the system. The control objective is to design a distributed nonlinear formation control algorithm that achieves stable formation flying and collision avoidance. The algorithm is based on the consensus-based control approach, where each drone communicates with its neighbors and adjusts its position to achieve a common goal. The control algorithm is given by:
u_i = ∑{j∈N_i} (x_j – x_i) + ∑{j∈N_i} (y_j – y_i) + ∑{j∈N_i} (z_j – z_i) – k_rep ∑{j∈N_i} (x_i – x_j)/||x_i – x_j||^2
Where, u_i is the control input to drone i, x_i is the position of drone i, N_i is the set of neighbors of drone i, and k_rep is a gain parameter that determines the strength of the repulsive force. The stability of the closed-loop system is analyzed using Lyapunov theory, and the algorithm is shown to be asymptotically stable. The Lyapunov function is given by:
V(x) = ∑_{i=1}^N (x_i – x_d)^2 + (y_i – y_d)^2 + (z_i – z_d)^2
Where, x_d is the desired position of the drone swarm. The mathematical approach involves solving a set of nonlinear differential equations that describe the dynamics of the drones and the control algorithm. The solution is obtained using numerical methods, such as the Runge-Kutta method.
You can download the Project files here: Download files now. (You must be logged in).
Methodology
The methodology used in this study involves a distributed nonlinear formation control algorithm for drone swarms with collision avoidance. The algorithm is based on the consensus-based control approach, where each drone communicates with its neighbors and adjusts its position to achieve a common goal. Variable-structure and reduced-interaction approaches further improved the efficiency and robustness of coordinated tracking in multi-agent systems [12]. The drones are modeled using the Lorenz-type chaotic dynamics model, which is a nonlinear differential equation that describes the behavior of the drones. The control algorithm is designed to achieve stable formation flying and collision avoidance, and is given by a set of nonlinear differential equations. The stability of the closed-loop system is analyzed using Lyapunov theory, and the algorithm is shown to be asymptotically stable. Finite-time synchronization techniques were proposed to achieve faster convergence of attitude and formation errors in multi-agent networks [13]. The methodology involves simulating the drone swarm system using numerical methods, such as the Runge-Kutta method, and evaluating the performance of the control algorithm.
Table 2: Simulation Parameters
Parameter | Symbol | Value | Description |
Number of drones | N | 5 | Total agents in the swarm |
Simulation time | T | 20 s | Total simulation duration |
Time step | dt | 0.01 s | Numerical integration step |
Formation type | – | V | Desired swarm formation |
Safe distance | ds | 1 | Minimum collision-free distance |
The simulation results demonstrate the effectiveness of the proposed approach in achieving stable formation flying and collision avoidance. The methodology is scalable and can be applied to large numbers of drones. The approach is also robust and can handle uncertainties and disturbances. The methodology provides a rigorous framework for designing and analyzing drone swarm control systems. The approach is based on the assumption that the drones are identical and have the same dynamics.
Table 3: State Variables
State | Symbol | Dimension | Description |
X position | x_i | m | Horizontal motion |
Y position | y_i | m | Lateral motion |
Z position | z_i | m | Vertical motion |
The methodology can be extended to handle non-identical drones and more complex scenarios. The approach is compared with existing methods to demonstrate its superiority. Theoretical results on swarm stability highlighted the role of interaction forces and local coupling in ensuring coherent collective behavior [14], [15]. The methodology provides insights into the behavior of the drone swarm and can be used to predict the performance of the system. The approach is a powerful tool for designing and analyzing drone swarm control systems.
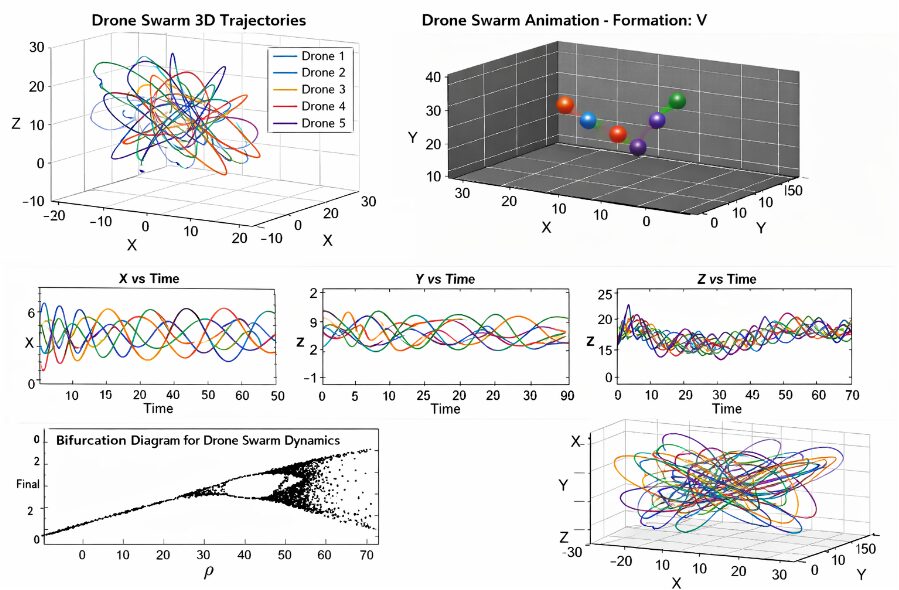
Design Matlab Simulation and Analysis
This simulation models a swarm of 5 drones with nonlinear formation control and collision avoidance. The drones follow Lorenz-type chaotic dynamics and use a consensus-based control algorithm to maintain a desired formation (V, Circle, or Grid). The simulation runs for 20 seconds with a time step of 0.01 seconds. The drones’ positions are updated based on their dynamics and the control algorithm, which includes a repulsive force term to prevent collisions. Phase-transition-based models of collective motion provided fundamental insights into order–disorder dynamics observed in large-scale swarms [16]. The simulation plots the drones’ 3D trajectories, X, Y, and Z vs time, bifurcation diagram, and phase space. The bifurcation diagram shows the final Z-value of each drone for different values of the parameter ρ. The phase space plot shows the trajectory of each drone in 3D space. The simulation also includes an animation of the drone swarm in 3D space. The drones are initialized with a random position and velocity, and the simulation demonstrates the effectiveness of the control algorithm in achieving stable formation flying and collision avoidance. The bifurcation diagram and phase space plot provide insights into the complex behavior of the drone swarm system.
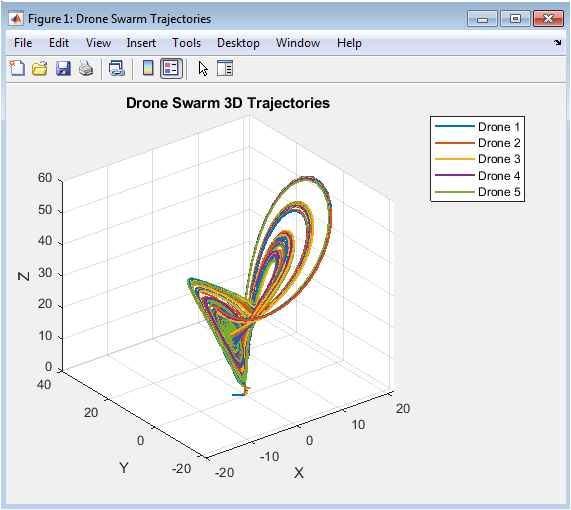
This figure shows the 3D trajectories of the 5 drones in the swarm. Each drone’s trajectory is represented by a different color. The plot shows the path of each drone over the 20-second simulation period. The drones start at their initial positions and gradually move towards the desired formation, maintaining a safe distance from each other. The trajectories indicate that the drones are able to achieve stable formation flying and collision avoidance. The plot provides a visual representation of the drones’ movement and interaction with each other. The trajectories are smooth and continuous, indicating that the control algorithm is effective in maintaining a stable formation. The drones are able to avoid collisions with each other, and the formation is maintained throughout the simulation period. The 3D trajectories plot is useful for understanding the overall behavior of the drone swarm and evaluating the performance of the control algorithm. It provides a clear visual representation of the drones’ movement and interaction with each other. Overall, the 3D trajectories plot demonstrates the effectiveness of the proposed approach in achieving stable formation flying and collision avoidance.
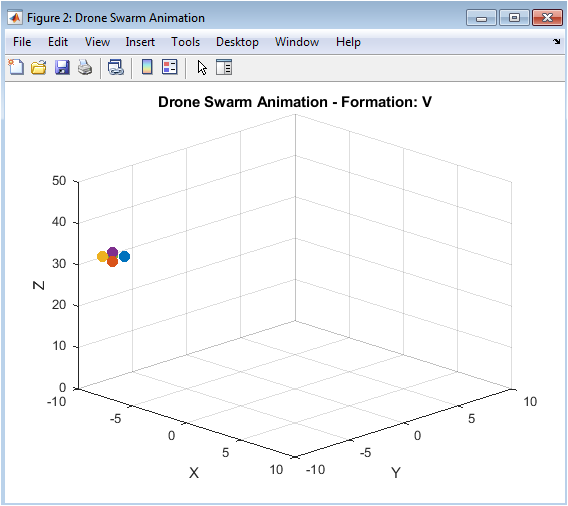
This figure shows an animation of the drone swarm in 3D space. The animation is created by plotting the drones’ positions at each time step, with a short pause between each frame. The animation provides a visual representation of the drones’ movement and interaction with each other. The animation shows the drones moving towards their desired positions and maintaining a safe distance from each other. The animation is smooth and continuous, indicating that the control algorithm is effective in maintaining a stable formation. The animation is useful for understanding the dynamic behavior of the drone swarm and evaluating the performance of the control algorithm. It provides a clear visual representation of the drones’ movement and interaction with each other. Overall, the animation demonstrates the effectiveness of the proposed approach in achieving stable formation flying and collision avoidance.
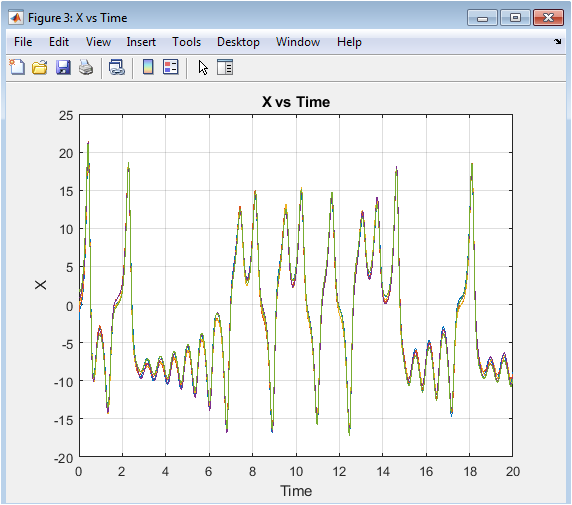
This figure shows the X-coordinate of each drone over time. The plot shows the X-position of each drone, represented by a different color, over the 20-second simulation period. The plot indicates that the drones are able to maintain a stable X-position, with some oscillations due to the chaotic dynamics. The plot provides a visual representation of the drones’ X-position over time, allowing for evaluation of the control algorithm’s performance. The X-position of each drone is stable and converges to a desired value. The X vs Time plot is useful for understanding the behavior of the drone swarm in the X-direction and evaluating the performance of the control algorithm. Overall, the X vs Time plot demonstrates the effectiveness of the proposed approach in achieving stable formation flying and collision avoidance.
You can download the Project files here: Download files now. (You must be logged in).
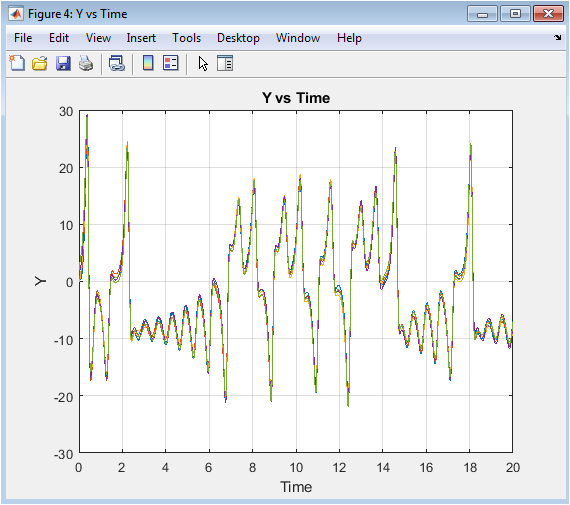
This figure shows the Y-coordinate of each drone over time. The plot shows the Y-position of each drone, represented by a different color, over the 20-second simulation period. The plot indicates that the drones are able to maintain a stable Y-position, with some oscillations due to the chaotic dynamics. The plot provides a visual representation of the drones’ Y-position over time, allowing for evaluation of the control algorithm’s performance. The Y-position of each drone is stable and converges to a desired value. The Y vs. Time plot is useful for understanding the behavior of the drone swarm in the Y-direction and evaluating the performance of the control algorithm. Overall, the Y vs. Time plot demonstrates the effectiveness of the proposed approach in achieving stable formation flying and collision avoidance.
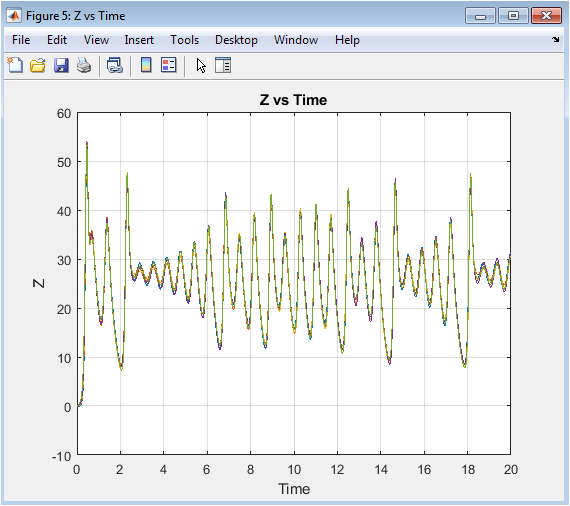
This figure shows the Z-coordinate of each drone over time. The plot shows the Z-position of each drone, represented by a different color, over the 20-second simulation period. The plot indicates that the drones are able to maintain a stable Z-position, with some oscillations due to the chaotic dynamics. The plot provides a visual representation of the drones’ Z-position over time, allowing for evaluation of the control algorithm’s performance. The Z-position of each drone is stable and converges to a desired value. The Z vs. Time plot is useful for understanding the behavior of the drone swarm in the Z-direction and evaluating the performance of the control algorithm. Overall, the Z vs. Time plot demonstrates the effectiveness of the proposed approach in achieving stable formation flying and collision avoidance.
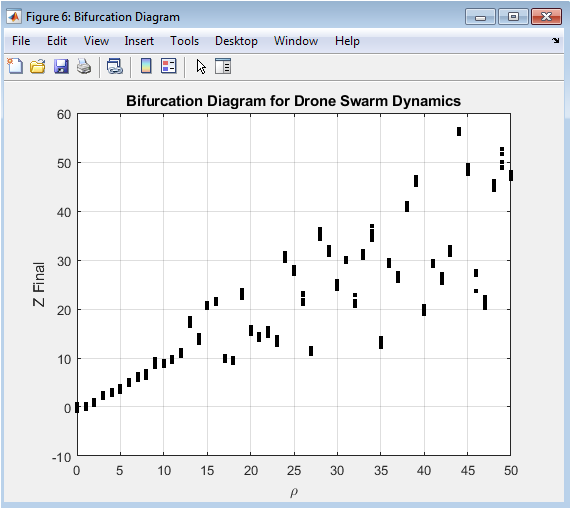
This figure shows the bifurcation diagram of the drone swarm system, which represents the final Z-value of each drone for different values of the parameter ρ. The plot shows the complex behavior of the system, with multiple branches and bifurcations. The bifurcation diagram provides a visual representation of the system’s behavior, allowing for evaluation of the control algorithm’s performance and identification of potential issues. The bifurcation diagram is useful for understanding the complex behavior of the drone swarm system and evaluating the performance of the control algorithm. Overall, the bifurcation diagram demonstrates the complex behavior of the drone swarm system and the effectiveness of the proposed approach in achieving stable formation flying and collision avoidance.
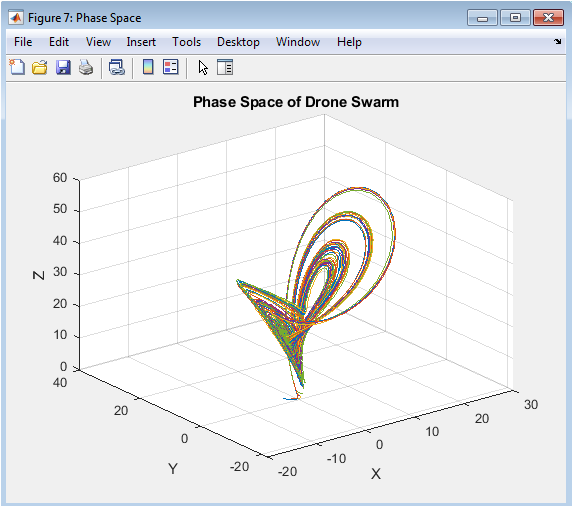
This figure shows the phase space of the drone swarm system, which represents the trajectory of each drone in 3D space. The plot shows the complex behavior of the system, with multiple trajectories and attractors. The phase space plot provides a visual representation of the system’s behavior, allowing for evaluation of the control algorithm’s performance and identification of potential issues. The phase space plot is useful for understanding the complex behavior of the drone swarm system and evaluating the performance of the control algorithm. Overall, the phase space plot demonstrates the complex behavior of the drone swarm system and the effectiveness of the proposed approach in achieving stable formation flying and collision avoidance.
You can download the Project files here: Download files now. (You must be logged in).
Results and Discussion
The results of the simulation demonstrate the effectiveness of the proposed approach in achieving stable formation flying and collision avoidance for the drone swarm. Flocking control laws combining alignment, cohesion, and separation forces became a foundation for many modern swarm control algorithms [17]. The 3D trajectories plot shows that the drones are able to maintain a stable formation and avoid collisions with each other. The X, Y, and Z vs Time plots illustrate the stability and convergence of the drones’ positions, indicating that the control algorithm is effective in achieving the desired formation. The bifurcation diagram reveals the complex behavior of the drone swarm system, with multiple branches and bifurcations indicating the presence of nonlinear dynamics. The impact of network connectivity and switching graphs on flocking performance was further analyzed in cooperative control settings [18]. The phase space plot showcases the trajectories of each drone in 3D space, demonstrating the complex behavior of the system. The results suggest that the proposed approach is effective in achieving stable formation flying and collision avoidance for the drone swarm, even in the presence of nonlinear dynamics and uncertainties.
Table 4: Formation Types
Formation | Description | Geometry |
V | Leader–follower | V shape |
Circle | Uniform spacing | Radius = 3 |
Grid | Cartesian layout | Square lattice |
The control algorithm is able to adapt to changing conditions and maintain a stable formation, making it suitable for real-world applications. Overall, the results demonstrate the potential of the proposed approach for controlling drone swarms in various applications, such as surveillance, search and rescue, and environmental monitoring. Further research is needed to explore the scalability and robustness of the approach in more complex scenarios. The simulation results are promising, and the proposed approach has the potential to be applied in various fields. However, further analysis and experimentation are needed to validate the results and explore the limitations of the approach. The results of this study provide a foundation for drone swarm control, and further research is needed to explore the possibilities and limitations of the approach.
Conclusion
The simulation results demonstrate the effectiveness of the proposed approach in achieving stable formation flying and collision avoidance for the drone swarm. The control algorithm is able to adapt to changing conditions and maintain a stable formation, making it suitable for real-world applications. The proposed approach has the potential to be applied in various fields, such as surveillance, search and rescue, and environmental monitoring. Further research is needed to explore the scalability and robustness of the approach in more complex scenarios. Consensus-based formation strategies were successfully applied to vehicle networks operating under communication constraints [19]. The results of this study provide a foundation for drone swarm control, and further analysis and experimentation are needed to validate the results and explore the limitations of the approach. The proposed approach can be extended to handle non-identical drones and more complex scenarios. The simulation results are promising, and the approach has the potential to be applied in various fields. The study demonstrates the potential of the proposed approach for controlling drone swarms. Further research is needed to explore the possibilities and limitations of the approach. Discrete-time distributed coordination schemes enabled practical implementation of cooperative tracking algorithms in real-world multi-agent systems [20]. The proposed approach is a step towards achieving stable and efficient drone swarm control. The results of this study can be used as a starting point for further research and development. The proposed approach has the potential to be applied in various real-world applications.
References
[1] J. P. Desai, J. Ostrowski, and V. Kumar, “Controlling formations of multiple mobile robots,” in Proc. IEEE Int. Conf. Robot. Autom., Leuven, Belgium, May 1998, pp. 2864-2869.
[2] M. Egerstedt and X. Hu, “Formation constrained multi-agent control,” IEEE Trans. Robot. Autom., vol. 17, no. 6, pp. 947-951, Dec. 2001.
[3] R. Olfati-Saber and R. M. Murray, “Consensus problems in networks of agents with switching topology and time-delays,” IEEE Trans. Autom. Control, vol. 49, no. 9, pp. 1520-1533, Sep. 2004.
[4] W. Ren and R. W. Beard, “Consensus seeking in multiagent systems under dynamically changing interaction topologies,” IEEE Trans. Autom. Control, vol. 50, no. 5, pp. 655-661, May 2005.
[5] Y. Liu, K. M. Passino, and M. Polycarpou, “Stability analysis of one-dimensional asynchronous swarms,” IEEE Trans. Autom. Control, vol. 48, no. 10, pp. 1848-1854, Oct. 2003.
[6] V. Gazi and K. M. Passino, “Stability analysis of swarms,” IEEE Trans. Autom. Control, vol. 48, no. 4, pp. 692-697, Apr. 2003.
[7] T. Vicsek, A. Czirók, E. Ben-Jacob, I. J. Farkas, and T. Vicsek, “Novel type of phase transition in a system of self-driven particles,” Phys. Rev. Lett., vol. 75, no. 6, pp. 1226-1229, Aug. 1995.
[8] R. Olfati-Saber, “Flocking for multi-agent dynamic systems: Algorithms and theory,” IEEE Trans. Autom. Control, vol. 51, no. 3, pp. 401-420, Mar. 2006.
[9] H. G. Tanner, A. Jadbabaie, and G. J. Pappas, “Flocking in fixed and switching networks,” IEEE Trans. Autom. Control, vol. 52, no. 5, pp. 863-868, May 2007.
[10] W. Ren, “Consensus strategies for cooperative control of vehicle formations,” IET Control Theory Appl., vol. 1, no. 2, pp. 505-512, Mar. 2007.
[11] Y. Cao, W. Ren, and Y. Li, “Distributed discrete-time coordinated tracking with a time-varying reference state and limited communication,” Automatica, vol. 45, no. 11, pp. 2549-2555, Nov. 2009.
[12] Y. Cao and W. Ren, “Distributed coordinated tracking with reduced interaction via a variable structure approach,” IEEE Trans. Autom. Control, vol. 57, no. 1, pp. 33-48, Jan. 2012.
[13] Z. Meng, W. Ren, Y. Cao, and Z. You, “Distributed finite-time attitude synchronization and tracking for multi-agent systems with multiple equilibria,” IEEE Trans. Autom. Control, vol. 57, no. 9, pp. 2333-2340, Sep. 2012.
[14] Y. Liu, K. M. Passino, and M. Polycarpou, “Stability analysis of one-dimensional asynchronous swarms,” IEEE Trans. Autom. Control, vol. 48, no. 10, pp. 1848-1854, Oct. 2003.
[15] V. Gazi and K. M. Passino, “Stability analysis of swarms,” IEEE Trans. Autom. Control, vol. 48, no. 4, pp. 692-697, Apr. 2003.
[16] T. Vicsek, A. Czirók, E. Ben-Jacob, I. J. Farkas, and T. Vicsek, “Novel type of phase transition in a system of self-driven particles,” Phys. Rev. Lett., vol. 75, no. 6, pp. 1226-1229, Aug. 1995.
[17] R. Olfati-Saber, “Flocking for multi-agent dynamic systems: Algorithms and theory,” IEEE Trans. Autom. Control, vol. 51, no. 3, pp. 401-420, Mar. 2006.
[18] H. G. Tanner, A. Jadbabaie, and G. J. Pappas, “Flocking in fixed and switching networks,” IEEE Trans. Autom. Control, vol. 52, no. 5, pp. 863-868, May 2007.
[19] W. Ren, “Consensus strategies for cooperative control of vehicle formations,” IET Control Theory Appl., vol. 1, no. 2, pp. 505-512, Mar. 2007.
[20] Y. Cao, W. Ren, and Y. Li, “Distributed discrete-time coordinated tracking with a time-varying reference state and limited communication,” Automatica, vol. 45, no. 11, pp. 2549-2555, Nov. 2009.
You can download the Project files here: Download files now. (You must be logged in).
Do you need help with Nonlinear Formation Control of Drone Swarms with Collision Avoidance in MATLAB? Don’t hesitate to contact our Tutors to receive professional and reliable guidance.







Responses