Modeling of Automotive Power Network for Analysis of Power Electronics and Losses Calculation and Verification by Measurements on Claw-Pole Alternator
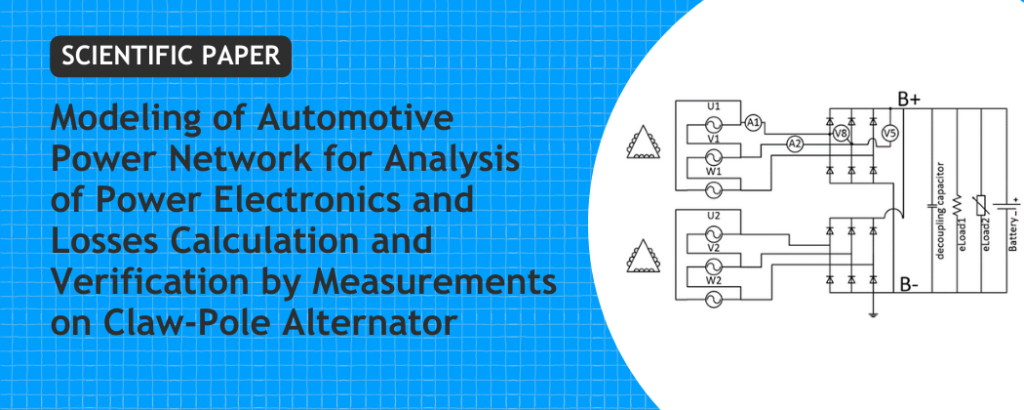
Abstract—The current paper introduces the model for analysis and calculation of power electronics losses. The developed model was verified by measurements on the automotive claw-pole...