

Ethically-Aware Leader-Follower Formation Control of Multi-Robot Systems Using ROS
Author: Waqas Javaid
INTRODUCTION
Coordinating a collection of robots to keep a specific formation while navigating is known as formation control of numerous robots. Applications such as environmental monitoring, cooperative transportation, and autonomous vehicle platooning call for this in particular [8]. Owing to its simplicity and efficiency, the leader-follower model—in which one robot assumes the role of the leader and the others follow—is a subject of intense research. This essay examines the importance of leader-follower formation control, the fundamental ideas at play, and the moral dilemmas raised by implementing such systems in public settings.
The application of autonomous robots in various domains has seen significant advancements in recent years, driven by the growing need for automation and efficiency. Among these applications, leader-follower formation control of multi-robot systems stands out as a critical area of research, with potential impacts on industries such as logistics, surveillance, environmental monitoring, and urban mobility [1] [3]. The basic purpose of leader-following formation control is to enable a group of robots to move in a coordinated fashion, where one robot, designated as the leader, directs the trajectory, while the follower robots maintain certain relative positions. This coordination is vital for tasks that involve collective action, such as search and rescue missions, agricultural harvesting, and automated distribution systems.
The importance of leader-follower formation control originates from its capacity to improve multi-robot systems’ performance in intricate tasks by increasing their adaptability and efficiency. A well-coordinated group of robots, for example, may cover larger regions more efficiently than a single robot during search and rescue operations, increasing the likelihood of finding survivors. Similar to this, formation control in agriculture enables exact synchronization of planting, watering, and harvesting, boosting output and cutting labor expenses. The fact that these systems can function in a variety of conditions, from controlled indoor spaces to uncontrolled outdoor landscapes, emphasizes how important they are even more.
Even though leader-follower formation control has many benefits, there are drawbacks when putting it into practice, especially in chaotic and dynamic settings [6]. While they can be useful in environments that are stable, geometric control techniques—which depend on maintaining fixed relative positions—find it difficult to adapt to changing circumstances. Potential field approaches offer enhanced flexibility but are sensitive to difficulties such as local minima and oscillatory behavior near obstacles. Behavior-based approaches give a decentralized approach, allowing robots to react to local conditions, but require sophisticated coordination systems to maintain stable and coherent group behavior [7] [9]. Control algorithms and coordination techniques require constant research and innovation to meet these challenges.
In addition to the technological difficulties, the use of autonomous robots brings up important ethical issues that need to be resolved in order to guarantee their appropriate societal integration. Safety is critical since any glitch or mistake in the control algorithms could result in mishaps, especially in settings where people and robots interact closely. Robotic data collection raises privacy concerns since it may contain sensitive information about people and their environments. To keep the public’s trust, it is imperative that this data is managed safely and ethically. Algorithmic bias can also result in the unjust treatment of particular groups, which emphasizes the necessity of fairness and openness in the development and application of these systems [10] [12].
It is impossible to ignore how autonomous robots will affect labor relations in the larger social context. Automation has the potential to boost production and efficiency, but it also has the potential to displace human labor, especially in sectors of the economy that primarily depend on manual labor. Addressing this issue requires a diverse strategy, including retraining programs for affected people and policies that support the emergence of new job possibilities in developing technical domains. By considering these ethical and social considerations, we can design autonomous robotic systems that not only increase technological capabilities but also contribute positively to society.
2. CURRENT STATUS OF LEADER-FOLLOWER FORMATION CONTROL
With the advancement of algorithms and simulations, leader-follower formation control has made tremendous progress. A popular tool for teaching ROS (Robot Operating System) is the Turtlesim simulator, which illustrates fundamental ideas and control techniques [13]. To achieve formation control, a number of algorithms, including geometric, potential field, and behavior-based methods, have been proposed in figure 1.
3. ETHICAL IMPLICATIONS
Deploying autonomous robots in real-world contexts presents various ethical concerns:
A. Security
It is crucial to protect both human and robotic safety. Robots that are autonomous need to be able to avoid collisions and perform dependably in a variety of environments. Accidents and injuries may occur from a failure to maintain safety [11].
B. Confidentiality
Robots frequently use cameras and sensors, which may unintentionally record private information about people and their surroundings. It is essential to safeguard data privacy and prevent illegal access.
C. The Bias in Algorithms
Biases in the algorithms controlling autonomous robots may result in unjust treatment or unforeseen outcomes. It is crucial to create and evaluate algorithms that are impartial and fair.
D. Employment Relations
The implementation of self-driving robots in various industries may result in workforce displacement, thereby impacting employees’ livelihoods. It is crucial to take into account the social ramifications and offer assistance to impacted employees.
4. IMPLEMENTATION USING ROS AND TURTLESIM
Using the Turtlesim simulator in ROS, leader-follower formation control is implemented by spawning several turtles, appointing a leader, and making sure followers keep the desired formation. Determining unique messages and services for control and communication is part of the process.
You can download the Project files here: Download files now. (You must be logged in).
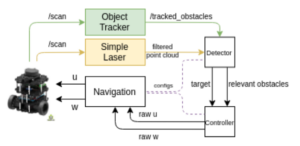
A. Monitoring
The tracking problem is to guarantee that the robot tracks a target point inside its field of vision while maintaining a constant distance from it.
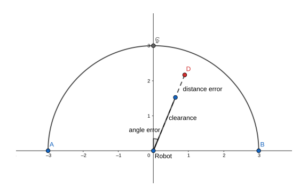
a) Proceed to the Goal PID.
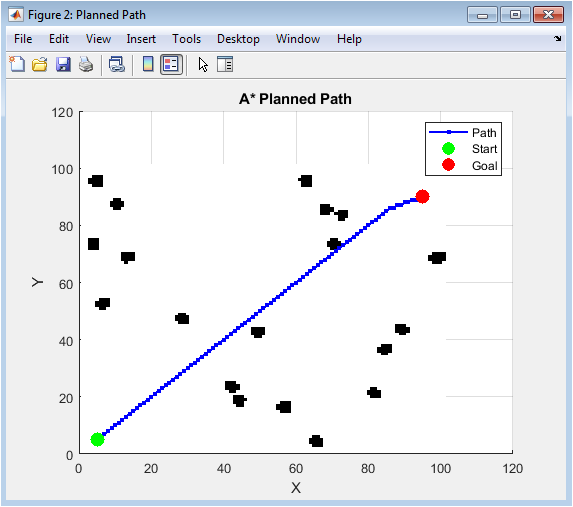
Using a go-to-goal controller is one of the most computationally efficient ways to solve the point-tracking problem. For a turtlebot, its angular velocity (w) and linear speed (u) are controllable parameters over time. Thus, the tracking situation might be reduced to the one represented in Figure 2, where our go-to-goal controller aims to minimize the distance error and the direction error between the robot and the target.
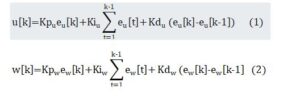
b) Setting Off Turtles
Three turtles are created using a launch file: a leader and two followers, who begin at random positions and orientations proposed in Equation 1 and Equation 2 respectively.
c) Control of Formation
Followers follow directions from the leader to move to designated spots while keeping a predetermined distance. Following the leader, the followers form a column by adjusting their positions accordingly.
d) Interaction
Coordinated movement and formation maintenance are made possible by the leader and followers communicating more easily thanks to custom ROS messages and services.
5. CASE STUDY
A. Leader-Follower Robots in Urban Environments: An Ethical Analysis
Examining the ethical implications of leader-follower formation control robot deployment in urban areas is an intriguing but challenging subject [14]. In this scenario, packages are delivered by a fleet of autonomous delivery robots navigating congested city streets. The leader robot, equipped with advanced navigation and decision-making skills, leads a formation of follower robots that maintain a predetermined distance and orientation relative to the leader [15]. This strategy strives to improve the efficiency and safety of last-mile delivery services.
B. Operational Reliability and Safety
Making sure that pedestrians and other road users are safe is the main ethical consideration in this urban deployment. To avoid collisions, the autonomous delivery robots need to be outfitted with strong obstacle recognition and avoidance capabilities. They should be capable of making real-time decisions to navigate dynamic environments, such as avoiding unexpected obstacles like pedestrians suddenly crossing their path. Furthermore, these robots need to be tested extensively under various conditions, including different weather scenarios and varying levels of pedestrian traffic, to ensure they operate reliably without causing harm [16]. Failure to solve these safety problems could lead to accidents, resulting in injuries or even fatalities, thereby weakening public trust in autonomous technologies.
C. Data security and privacy
Since the robots use a variety of sensors, such as cameras and LiDAR, to sense their surroundings, privacy is still another important concern. These sensors raise issues about data privacy and monitoring since they may unintentionally gather sensitive information about people and private properties. Strict data protection protocols must be put in place, guaranteeing that any information gathered is anonymized, safely kept, and that access to it is tightly restricted. To further allay privacy concerns, explicit guidelines for data utilization should be developed, and the general public should be made aware of the existence and function of these robots. Upholding legal requirements and preserving public confidence will depend heavily on data processing procedures’ transparency.
D. Algorithmic Unfairness and Bias
Another ethical dilemma is algorithmic prejudice. Fair and impartial decision-making algorithms must be developed to direct the robots’ navigation and interactions with their surroundings. These algorithms’ biases could lead to unfair treatment of particular groups of individuals, such as giving preference to some routes over others, which could have an impact on the effectiveness and equity of service delivery. To make sure algorithms work equitably in a variety of urban environments, they must be carefully designed and put into use. This entails taking into account various socioeconomic zones, fluctuating pedestrian traffic volumes, and making sure the robots’ actions don’t adversely affect any one neighborhood more than another.
In short, the use of leader-follower robots in urban settings can greatly improve last-mile delivery service efficiency, but it also presents a number of ethical issues. In order to employ these technologies responsibly, it is imperative to address safety concerns, ensure data privacy and security, and mitigate algorithmic bias. We can maximize the advantages of autonomous robots while reducing any potential drawbacks for society by proactively addressing these problems.
6. OVERVIEW OF THE LITERATURE REVIEW
Leader-follower dynamics in the subject of robotics, control is a well-studied topic. Several studies have examined different algorithms and control strategies to create effective and dependable coordination among several robots. A large amount of the literature is devoted to geometric control techniques, in which predefined geometric shapes, such lines, circles, or more intricate formations, are used to preserve the relative locations of robots [20]. These techniques, while simple and efficient in organized situations, frequently encounter difficulties in dynamic and unstructured contexts because of their dependence on exact placement and poor capacity to adjust to shifting circumstances.
Potential field techniques, in addition to geometric approaches, have been extensively researched for their capacity to offer collision avoidance and seamless navigation [15] [17]. By treating robots as particles in a field of forces, these techniques steer followers in the direction of the leader while repelling them from colliding with objects or other robots. Although potential field approaches can be more flexible in dynamic situations, they may have drawbacks such as oscillatory behaviors close to barriers and local minima, which occur when robots get stuck in undesirable postures. To counter these shortcomings, researchers have suggested a number of improvements, including hybrid systems that combine potential fields with alternative control techniques.
Another popular field of research is behavior-based techniques, in which a set of rules or behaviors control the activities of robots. Because they enable decentralized decision-making and allow robots to respond to local situations, these techniques are especially beneficial in complicated contexts. It is possible to teach follower robots to do tasks like “follow the leader,” “avoid obstacles,” and “maintain formation,” for example, which allows them to adjust to changes in their surroundings without needing centralized control [18]. But sustaining formation stability and ensuring coherent group behavior continue to be difficult tasks that frequently call for complex behavior coordination systems and a great deal of behavior parameter tuning.
The literature is beginning to focus more and more on ethical issues as a result of increased awareness of the wider societal effects of deploying autonomous robots. Research has indicated how crucial it is to create safety features to avert mishaps and guarantee strong data privacy protocols to safeguard people’s private information. Algorithmic fairness is also a major topic, with researchers emphasizing the necessity to build unbiased algorithms that do not disproportionately affect specific groups. Furthermore, the possible displacement of human labor by autonomous robots has generated calls for policies and methods to ameliorate negative socio-economic repercussions, such as retraining programs and the establishment of new work opportunities in developing technology domains [19].
In summary, even though the technological components of leader-follower formation control have advanced significantly, issues remain, especially in dynamic and unstructured settings. Furthermore, ethical issues are getting more and more significant, necessitating a multidisciplinary approach to guarantee that the use of autonomous robots is beneficial to society as a whole. To enable the proper integration of autonomous robots into daily life, future research should keep investigating novel control mechanisms and ethical concerns.
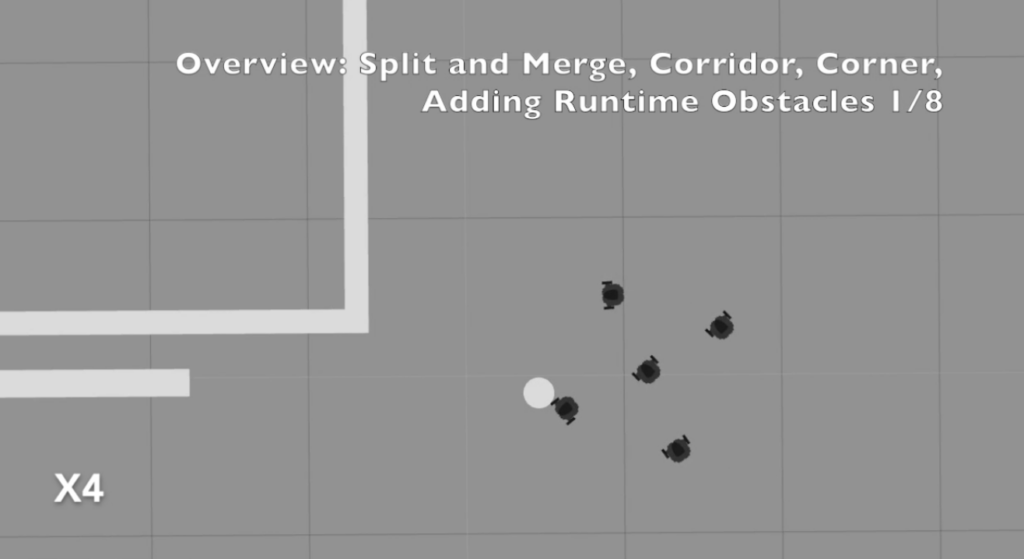
7. RESULTS AND SIMULATION
Both systems can successfully divide and reunite to avoid obstacles, turn corners, and handle passageways by switching formations. We further illustrate this in a movie [6] by including an obstacle that is added at run-time.
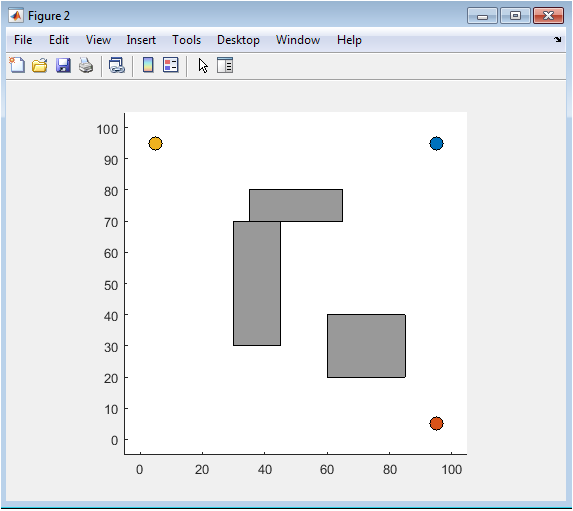
We experimented in a number of settings. The square’s results are shown below (Fig. 3, 4, 5, 6 and 7).
The first, haphazard arrangement of the robots in the simulation environment is depicted in Figure 3. Starting from random placements and orientations, two robots are assigned as followers and one robot is selected as the leader.
Figure 4: The robots are seen in this figure approaching an obstacle while still forming a leader-follower configuration. As they change places to get around the impediment, the followers follow the leader’s course.
Figure 5: In multi-robot systems, both centralized and decentralized control strategies are shown. While each robot in decentralized control makes decisions based on local knowledge, all the robots are coordinated by a single entity in centralized control.
The figure 6 shows a robot moving through hallways and displaying its flexibility in changing directions and adjusting to its surroundings. This demonstrates the robot’s capacity for independent decision-making and route planning.
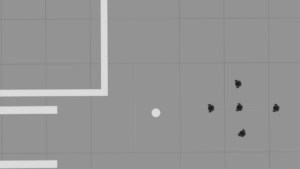
This figure 7 shows the robot formation’s numerous adaptive behaviors, such as dividing and merging to avoid obstacles, negotiating sharp curves, adjusting to new barriers, and transitioning to a column formation to increase safety in confined spaces.
You can download the Project files here: Download files now. (You must be logged in).
8. CONCLUSIONS
The exploration of leader-follower formation control in multi-robot systems reveals both the potential and challenges of deploying such technologies in real-world scenarios. Technically, many control mechanisms, including geometric, potential field, and behavior-based methods, have showed promise in achieving and maintaining desirable shapes. Each method has its pros and limits, with geometric approaches offering simplicity, potential fields providing flexibility in dynamic contexts, and behavior-based methods enabling decentralized decision-making. These tactics’ effective application in controlled environments is demonstrated by the Turtlesim simulator in ROS, which was used to implement them. Still, a crucial area for research and development needs to be addressed to provide dependable performance in unstructured and dynamic real-world contexts.
To secure societal acceptability and trust, the ethical concerns of deploying autonomous leader-follower robots need to be thoroughly considered, in addition to technical ones. The prevention of accidents, privacy protection for sensitive data, the eradication of algorithmic bias for equitable treatment of all people, and the socioeconomic effects of possible employment displacement are among the main ethical concerns. The case study on the urban deployment of delivery robots emphasizes the significance of these factors by stressing the necessity of strong safety protocols, open data processing procedures, equitable algorithms, and worker support programs. We can maximize the positive effects of autonomous robots while reducing any potential bad effects by including ethical considerations into their design and implementation. This will pave the road for a responsible and long-lasting integration of these machines into society.
9. REFRENCES
- “Cooperative Control of Multi-Agent Systems: A Consensus Region Approach,” Q. Li, Y. Guo, and Z. Qu, IEEE Transactions on Automatic Control, vol. 60, no. 4, 2016, pp. 1070–1075.
- “Maintaining Network Connectivity and Performance in Robot Teams,” by M. A. Hsieh, A. Cowley, V. Kumar, and C. J. Taylor, was published in the Journal of Field Robotics in February 2008, volume 25, issue 1-2, pages 111–131.
- “Consensus Problems in Networks of Agents with Switching Topology and Time-Delays,” R. Olfati-Saber and R. M. Murray, IEEE Transactions on Automatic Control, vol. 49, no. 9, pp. 1520-1533, September 2004.
- “Information Consensus in Multivehicle Cooperative Control,” IEEE Control Systems Magazine, vol. 27, no. 2, pp. 71-82, April 2007. W. Ren, R. W. Beard, and E. M. Atkins.
- “Coverage Control for Mobile Sensing Networks,” by J. Cortés, S. Martínez, T. Karatas, and F. Bullo, appeared in the IEEE Transactions on Robotics and Automation, volume 20, issue 2, April 2004, pp. 243-255.
- “Formation Constrained Multi-Agent Control,” M. Egerstedt and X. Hu, IEEE Transactions on Robotics and Automation, vol. 17, no. 6, pp. 947-951, Dec. 2001.
- “Stable Social Foraging Swarms in a Noisy Environment,” by Y. Liu and K. M. Passino, IEEE Transactions on Automatic Control, vol. 49, no. 1, pp. 30-44, January 2004.
- “Formation Control and Collision Avoidance for Multi-Agent Nonholonomic Systems: Theory and Experiments,” International Journal of Robotics Research, vol. 27, no. 1, pp. 107-126, Jan. 2008, S. Mastellone, D. M. Stipanović, C. Graunke, K. A. Intlekofer, and M. W. Spong.
- “Necessary and Sufficient Graphical Conditions for Formation Control of Unicycles,” Z. Lin, B. Francis, and M. Maggiore, IEEE Transactions on Automatic Control, vol. 50, no. 1, pp. 121-127, Jan. 2005.
- “Information Flow and Cooperative Control of Vehicle Formations,” A. Fax and R. M. Murray, IEEE Transactions on Automatic Control, vol. 49, no. 9, pp. 1465-1476, September 2004.
- “Abstraction and Control for Groups of Robots,” by C. Belta and V. Kumar, IEEE Transactions on Robotics, vol. 20, no. 5, Oct. 2004, pp. 865-875.
- “Distributed Receding Horizon Control for Multi-Vehicle Formation Stabilization,” B. Dunbar and R. M. Murray, Automatica, vol. 42, no. 4, pp. 549–558, April 2006.
- “A General, Local Algorithm for Robot Formations,” by J. Fredslund and M. J. Mataric, IEEE Transactions on Robotics and Automation, vol. 18, no. 5, pp. 837-846, Oct. 2002.
- “A Vision-Based Formation Control Framework,” IEEE Transactions on Robotics and Automation, vol. 18, no. 5, pp. 813-825, Oct. 2002, A. K. Das, R. Fierro, V. Kumar, J. P. Ostrowski, J. Spletzer, and C. J. Taylor.
- Carpin, M. E. Lewis, J. Wang, A. Birk, and J. Penders, “Bridging the Gap Between Simulation and Reality in Robotic Systems,” in Proceedings of the 12th International Conference on Advanced Robotics (ICAR), 2005, pp. 9-15.
- Michael, M. M. Zavlanos, V. Kumar, and G. J. Pappas, “Maintaining Connectivity in Mobile Robot Networks,” in Experimental Robotics, Berlin, Germany: Springer, 2009, pp. 117-126.
- Arkin (1998), “Behavior-Based Robotics,” Cambridge, MA: MIT Press.
- “Formation Stability in Multiple Robot Systems,” K. Sycara and M. Lewis, Autonomous Robots, vol. 12, no. 3, pp. 239-254, May 2002.
- “Graph Theoretic Methods in Multiagent Networks,” by M. Mesbahi and M. Egerstedt, Princeton University Press, 2010.
- “Formations with a Mission: Stable Coordination of Vehicle Group Maneuvers,” by P. Ogren, E. Fiorelli, and N. E. Leonard, in Proceedings of the 15th IFAC World Congress, 2002, pp. 403–408.
You can download the Project files here: Download files now. (You must be logged in).





Responses