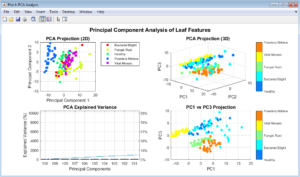
Automated Plant Disease Identification Using Feature Engineering and Supervised Learning in Matlab waqas javaid 14. March 2026 Read More »
Density Matrix Approach to Quantum Error Correction Using MATLAB Simulation waqas javaid 13. March 2026 Read More »
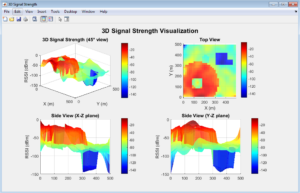
Spatial Mapping and Analysis of Wireless Signal Strength in Complex Urban Environments Using Matlab waqas javaid 13. March 2026 Read More »
Simulating End-to-End Optical Fiber Transmission, Complete Journey of a Photon Using Matlab waqas javaid 13. March 2026 Read More »
A Complete Gene Expression Analysis from Raw Data to Biological Insights Using Matlab waqas javaid 13. March 2026 Read More »
Computational Gait Analysis for Objective Mobility Impairment Screening from Signals to Insights Using Matlab waqas javaid 13. March 2026 Read More »
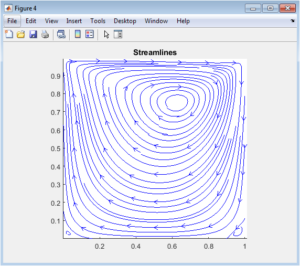
Numerical Exploration of Vortex Dynamics, Solving the Incompressible Navier-Stokes Equations Using Matlab waqas javaid 13. March 2026 Read More »
Radioactive Decay Chain Simulator Using Bateman Equations and Monte Carlo Methods in Matlab waqas javaid 13. March 2026 Read More »
Lorenz Attractor MATLAB Simulation, Chaos Theory, Code & Visualization waqas javaid 13. March 2026 Read More »
Numerical Investigation of the Quantum Harmonic Oscillator Using Finite Difference Methods in Matlab waqas javaid 13. March 2026 Read More »