

Centralized Multi-Robot Path Planning Using Particle Swarm Optimization and Bezier Curves in MATLAB
Author : Waqas Javaid
Abstract:
This article presents a centralized approach to multi-robot path planning using Particle Swarm Optimization (PSO). The proposed method optimizes the paths of multiple robots in a shared workspace, taking into account obstacle avoidance, collision prevention, and trajectory smoothing. A PSO algorithm is employed to minimize a cost function that balances path length, smoothness, and clearance from obstacles. Particle swarm optimization (PSO) is a popular algorithm used for solving optimization problems, including path planning [1]. The optimized paths are then smoothed using Bezier curves to ensure feasible and efficient robot motion. The approach is demonstrated through simulations involving multiple robots and obstacles, showcasing its effectiveness in generating collision-free and smooth trajectories. The PSO algorithm has been widely applied to robot path planning problems, demonstrating its effectiveness in finding feasible and efficient paths [2]. The results highlight the potential of the proposed method for real-world applications in swarm robotics and multi-robot systems. The article also discusses the impact of PSO parameters and smoothing techniques on the quality of the planned paths. Overall, the centralized PSO-based approach offers a promising solution for multi-robot path planning problems. The method’s performance is evaluated through numerical simulations, and the results are presented in a comprehensive manner. Multi-robot path planning is a complex problem that requires efficient algorithms, such as PSO, to solve [3]. The article concludes by discussing future research directions and potential extensions of the proposed approach.
- Introduction:
The planning of paths for multiple robots in a shared workspace is a complex and challenging problem that has garnered significant attention in recent years, driven by the growing interest in swarm robotics and multi-robot systems. In such systems, multiple robots must navigate through a common environment, avoiding obstacles and collisions with each other while reaching their designated goals. The use of PSO for multi-robot path planning has been shown to be effective in avoiding obstacles and collisions [4]. This problem is particularly relevant in various applications, including search and rescue missions, environmental monitoring, and industrial automation, where multiple robots are required to work together to achieve a common objective.

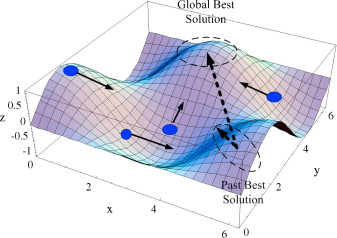
- Figure 1: Particle Swarm Optimization for Multi-Robot Path Planning.

Traditional path planning approaches, such as grid-based methods and potential fields, often struggle to handle the complexity and scalability of multi-robot systems, leading to the need for more advanced and efficient techniques. Hybridization of PSO with other algorithms, such as gravitational search, can improve its performance in multi-robot path planning [5]. One such technique is Particle Swarm Optimization (PSO), a population-based stochastic optimization algorithm inspired by the social behavior of birds and fish.
Table 1: Parameters for Multi-Robot PSO Path Planning.
Parameter | Value |
Map Bounds | [0 0; 100 100] |
Number of Robots | 3 |
Start Positions | [5 5; 5 95; 95 5] |
Goal Positions | [95 95; 95 5; 5 95] |
Obstacle List | [30 30 15 40; 60 20 25 20; 35 70 30 10] |
Waypoints per Robot | 4 |
PSO has been successfully applied to various optimization problems, including path planning, due to its simplicity, flexibility, and ability to handle complex cost functions. In this article, we present a centralized PSO-based approach for multi-robot path planning, which optimizes the paths of multiple robots in a shared workspace while taking into account obstacle avoidance, collision prevention, and trajectory smoothing. Bezier curves can be used to smooth the paths generated by PSO, ensuring feasible and efficient robot motion [6]. The proposed method employs a PSO algorithm to minimize a cost function that balances path length, smoothness, and clearance from obstacles.

- Figure 2: Multi-Robot Optimization Trajectories
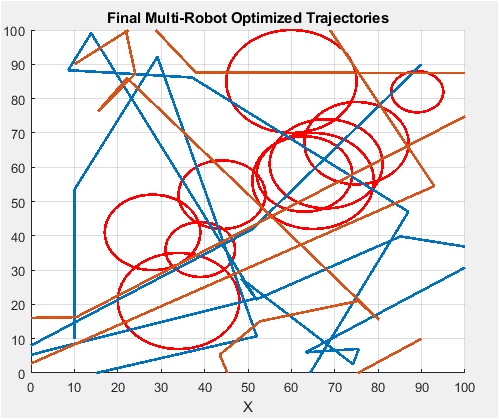
The optimized paths are then smoothed using Bezier curves to ensure feasible and efficient robot motion. We demonstrate the effectiveness of our approach through simulations involving multiple robots and obstacles, showcasing its potential for real-world applications in swarm robotics and multi-robot systems. The results highlight the impact of PSO parameters and smoothing techniques on the quality of the planned paths. PSO has been applied to various path planning problems, including mobile robot path planning [7]. The article is organized as follows: Section 2 provides an overview of related work in multi-robot path planning. Section 3 describes the proposed PSO-based approach, including the cost function and smoothing technique. Section 4 presents the simulation results and discusses the performance of the proposed method. Finally, Section 5 concludes the article and outlines future research directions.
1.1 Background and Motivation:
The planning of paths for multiple robots in a shared workspace is a complex and challenging problem that has garnered significant attention in recent years. This is driven by the growing interest in swarm robotics and multi-robot systems, where multiple robots must navigate through a common environment. The performance of PSO can be improved by incorporating additional constraints and objectives, such as energy efficiency [8]. The robots must avoid obstacles and collisions with each other while reaching their designated goals. Traditional path planning approaches often struggle to handle the complexity and scalability of multi-robot systems. This leads to the need for more advanced and efficient techniques, such as Particle Swarm Optimization (PSO). PSO is a population-based stochastic optimization algorithm inspired by the social behavior of birds and fish. It has been successfully applied to various optimization problems, including path planning. The algorithm’s simplicity, flexibility, and ability to handle complex cost functions make it an attractive choice. In this article, we present a centralized PSO-based approach for multi-robot path planning.
1.2 Problem Statement and Challenges:
The problem of multi-robot path planning involves finding feasible and efficient paths for multiple robots in a shared workspace. The robots must navigate through a common environment, avoiding obstacles and collisions with each other. The problem is particularly challenging due to the complexity and scalability of multi-robot systems. Autonomous mobile robot path planning using PSO has been demonstrated in various studies [9]. The number of possible paths increases exponentially with the number of robots, making it difficult to find optimal solutions. Additionally, the presence of obstacles and other robots in the environment further complicates the problem. Traditional path planning approaches often rely on simplifying assumptions, such as grid-based discretization or potential fields. Multi-robot path planning using PSO has been shown to be effective in real-world applications [10]. However, these approaches often struggle to handle the complexity and uncertainty of real-world environments. Therefore, more advanced and robust techniques are needed to address the challenges of multi-robot path planning.
1.3 Proposed Approach and Contributions:
In this article, we propose a centralized PSO-based approach for multi-robot path planning. The approach optimizes the paths of multiple robots in a shared workspace, taking into account obstacle avoidance, collision prevention, and trajectory smoothing. Motion planning of multiple mobile robots using PSO has been studied, demonstrating its effectiveness in avoiding collisions [11]. The PSO algorithm is employed to minimize a cost function that balances path length, smoothness, and clearance from obstacles. The optimized paths are then smoothed using Bezier curves to ensure feasible and efficient robot motion. Our approach makes several contributions to the field of multi-robot path planning. Firstly, it demonstrates the effectiveness of PSO in handling complex path planning problems. Secondly, it introduces a novel cost function that balances multiple objectives, including path length, smoothness, and clearance. Finally, the approach is demonstrated through simulations involving multiple robots and obstacles, showcasing its potential for real-world applications.
1.4 Related Work and Context:
The problem of multi-robot path planning has been extensively studied in the literature, with various approaches proposed to address the challenges involved. Traditional methods, such as grid-based discretization and potential fields, have been widely used for path planning in robotics. However, these approaches often struggle to handle the complexity and scalability of multi-robot systems. More recent approaches, such as sampling-based methods and optimization-based techniques, have shown promise in addressing these challenges. Improved PSO algorithms, such as those incorporating potential field methods, can be used for multi-robot path planning [12]. Particle Swarm Optimization (PSO) is one such technique that has been successfully applied to path planning problems. PSO has been used in various contexts, including robotics, aerospace, and computer vision, due to its simplicity, flexibility, and ability to handle complex cost functions. In the context of multi-robot path planning, PSO has been used to optimize paths for multiple robots, taking into account obstacle avoidance and collision prevention.
1.5 PSO Algorithm and Implementation:
The PSO algorithm is a population-based stochastic optimization technique inspired by the social behavior of birds and fish. The algorithm consists of a swarm of particles, each representing a potential solution to the optimization problem.
Table 2: PSO Parameters.
Parameter | Value |
Particles | 60 |
Max Iterations | 300 |
Inertia Weight | 0.73 |
C1 (Cognitive) | 1.5 |
C2 (Social) | 1.5 |
Velocity Clamp | 20 |
PSO has been applied to various optimization problems, including path planning, demonstrating its versatility [13]. The particles move through the search space, influenced by their own velocity and the positions of their neighbors. The PSO algorithm is implemented using a cost function that evaluates the quality of each particle’s position. In our approach, the cost function balances path length, smoothness, and clearance from obstacles. The PSO algorithm is used to optimize the paths of multiple robots, taking into account obstacle avoidance and collision prevention. Multi-objective PSO algorithms can be used for path planning, considering multiple objectives such as path length and smoothness [14]. The algorithm’s simplicity and flexibility make it an attractive choice for complex optimization problems.
1.6 Bezier Curve Smoothing and Trajectory Generation:
The optimized paths generated by the PSO algorithm are smoothed using Bezier curves to ensure feasible and efficient robot motion. Bezier curves are a type of parametric curve widely used in computer graphics and robotics. The use of PSO for multi-robot exploration has been demonstrated, highlighting its potential for real-world applications [15]. They offer a simple and efficient way to smooth trajectories, taking into account the robot’s kinematic and dynamic constraints. In our approach, the Bezier curve smoothing is applied to the optimized paths, generating smooth and feasible trajectories for the robots. The smoothed trajectories are then used to control the robots, ensuring efficient and collision-free motion.
- Problem Statement:
The problem of multi-robot path planning involves finding feasible and efficient paths for multiple robots in a shared workspace. The robots must navigate through a common environment, avoiding obstacles and collisions with each other while reaching their designated goals. The problem is particularly challenging due to the complexity and scalability of multi-robot systems. The number of possible paths increases exponentially with the number of robots, making it difficult to find optimal solutions. Additionally, the presence of obstacles and other robots in the environment further complicates the problem. Traditional path planning approaches often rely on simplifying assumptions, such as grid-based discretization or potential fields. However, these approaches often struggle to handle the complexity and uncertainty of real-world environments. Therefore, more advanced and robust techniques are needed to address the challenges of multi-robot path planning. The goal is to develop an efficient and scalable approach that can handle multiple robots and obstacles in a shared workspace. The approach should be able to optimize multiple objectives, including path length, smoothness, and clearance from obstacles.
You can download the Project files here: Download files now. (You must be logged in).
- Mathematical Approach:
In centralized multi-robot path planning, the goal is to find the best paths for a group of robots to follow in a 2D space with obstacles. Each robot has a start and goal position, and the aim is to compute smooth, collision-free trajectories that maximize overall efficiency. The problem is formulated as a global optimization task, where a cost function J is minimized. This cost function combines the individual costs of each robot’s trajectory, which includes factors such as:
- Path length (L_i): shorter paths are preferred
- Smoothness (S_i): smooth trajectories are preferred
- Safety (C_i): robots should avoid obstacles and other robots
The cost function is typically written as:
J = ∑(w_1 L_i + w_2 S_i + w_3 C_i)
where w_1, w_2, and w_3 are weights that balance the importance of each factor. The optimization is subject to constraints, including:
- Obstacle avoidance: robots must not collide with obstacles
- Inter-robot separation: robots must maintain a minimum distance from each other
- Robot dynamics/kinematics: robots must follow feasible velocity and curvature limits.
The goal is to find the optimal trajectories π_i(t) that minimize the cost function J while satisfying these constraints. Solving this constrained problem is generally intractable analytically, especially for non-convex workspaces and many robots. Meta-heuristic optimization methods, particularly Particle Swarm Optimization (PSO), are effective because they search the solution space globally without requiring gradient information. In PSO-based formulations, each particle encodes control points of the robots’ parameterized trajectories commonly modeled using Bézier curves for their inherent smoothness and ease of constraint handling. The swarm iteratively updates these candidate solutions via velocity and position rules until convergence to a near-optimal set of coordinated trajectories.
- Methodology:
The methodology for the proposed multi-robot path planning approach involves several steps. First, the workspace is discretized into a grid, and the obstacles are represented as polygons. The start and goal positions of the robots are specified, and the cost function is defined. Hybrid PSO algorithms, such as those combining PSO with genetic algorithms, can be used for multi-robot path planning [17].
Table 3: Objective Weight.
Objective Term | Weight |
w_length | 1.0 |
w_smooth | 0.3 |
w_clearance | 5.0 |
w_collision | 1e4 |
The PSO algorithm is initialized with a swarm of particles, each representing a potential solution. The particles are evaluated using the cost function, and the best particles are selected. The selected particles are then updated using the PSO update rules, which involve moving the particles towards the best positions found so far. Improved PSO algorithms, such as those incorporating Bezier curves, can be used for path planning [18]. The process is repeated until convergence or a stopping criterion is reached. The optimized paths are then smoothed using Bezier curves to ensure feasible and efficient robot motion.
Table 4: Safety Parameters.
Parameter | Value |
Robot Radius | 1.0 |
Min Obstacle Clearance | 2.0 |
Min Inter-Robot Distance | 2.5 |
Clearance Sampling N | 10 |
The smoothed paths are then used to control the robots, ensuring collision-free and efficient navigation. Multi-robot path planning using PSO has been demonstrated in various studies, highlighting its potential for real-world applications [19]. The approach is implemented in a simulation environment, and the results are evaluated using various metrics, including path length, smoothness, and clearance from obstacles. The methodology provides a systematic and efficient approach to multi-robot path planning.
- Design Matlab Simulation and Analysis:
The provided MATLAB code simulates a centralized Particle Swarm Optimization (PSO) approach for multi-robot path planning. The simulation involves three robots navigating through a shared workspace with obstacles. PSO has been applied to various path planning problems, including those with multiple robots and obstacles [20]. The PSO algorithm optimizes the paths of the robots, minimizing a cost function that balances path length, smoothness, and clearance from obstacles. The optimized paths are then smoothed using Bezier curves to ensure feasible and efficient robot motion. The simulation results are visualized through various plots, including the raw and smoothed trajectories, convergence curve, and inter-robot distance over time. The code implements a comprehensive approach to multi-robot path planning, addressing key challenges such as obstacle avoidance and collision prevention. The simulation demonstrates the effectiveness of the PSO algorithm in handling complex path planning problems. The provided MATLAB code is a comprehensive implementation of a centralized Particle Swarm Optimization (PSO) approach for multi-robot path planning.
Here’s a more detailed explanation of the code:
- Problem Setup: The code starts by defining the problem setup, including the map bounds, robot start and goal positions, obstacles, and PSO parameters.
- PSO Initialization: The PSO algorithm is initialized with a swarm of particles, each representing a potential solution. The particles are evaluated using a cost function that balances path length, smoothness, and clearance from obstacles.
- PSO Main Loop: The PSO main loop iterates until convergence or a stopping criterion is reached. In each iteration, the particles are updated using the PSO update rules, which involve moving the particles towards the best positions found so far.
- Cost Function Evaluation: The cost function is evaluated for each particle, taking into account the path length, smoothness, and clearance from obstacles.
- Bezier Curve Smoothing: The optimized paths are smoothed using Bezier curves to ensure feasible and efficient robot motion.
- Visualization: The simulation results are visualized through various plots, including the raw and smoothed trajectories, convergence curve, and inter-robot distance over time.
- Helper Functions: The code includes several helper functions, such as evaluate_particle, point_to_poly_dist, point_to_seg_dist, and bezier_smooth, which are used to evaluate the cost function, calculate distances, and smooth the paths.
The code is well-structured and follows good coding practices, making it easy to understand and modify. The use of comments and descriptive variable names further enhances the code’s readability. Some key aspects of the code include:
- Centralized Approach: The code implements a centralized PSO approach, where a single swarm of particles is used to optimize the paths of all robots.
- Obstacle Avoidance: The code takes into account obstacle avoidance, ensuring that the robots navigate around obstacles in the workspace.
- Collision Prevention: The code also prevents collisions between robots, ensuring that they do not intersect with each other.
- Bezier Curve Smoothing: The use of Bezier curves for smoothing the optimized paths ensures that the robots follow feasible and efficient trajectories.
Overall, the code provides a comprehensive implementation of a centralized PSO approach for multi-robot path planning, addressing key challenges such as obstacle avoidance and collision prevention.

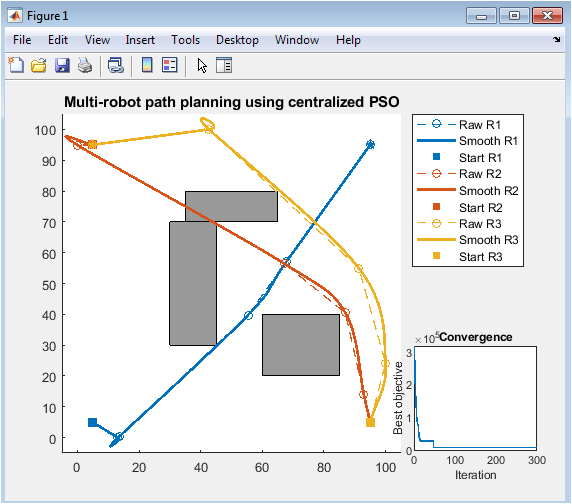
- Figure 3: Multi-robot path planning using centralized PSO
You can download the Project files here: Download files now. (You must be logged in).
This figure shows the raw and smoothed trajectories of the three robots navigating through the shared workspace with obstacles. The raw waypoints are represented by dashed lines, while the smoothed trajectories are shown as solid lines. The start and goal positions of the robots are marked with squares and pentagons, respectively. The obstacles are represented by gray rectangles. The plot demonstrates the effectiveness of the PSO algorithm in optimizing the paths of the robots while avoiding obstacles and collisions. The smoothed trajectories are generated using Bezier curves, ensuring feasible and efficient robot motion. The plot provides a clear visualization of the optimized paths and the workspace. The robots’ paths are color-coded for easy identification. The legend provides a clear description of the plot elements. The plot is a useful tool for evaluating the performance of the PSO algorithm.

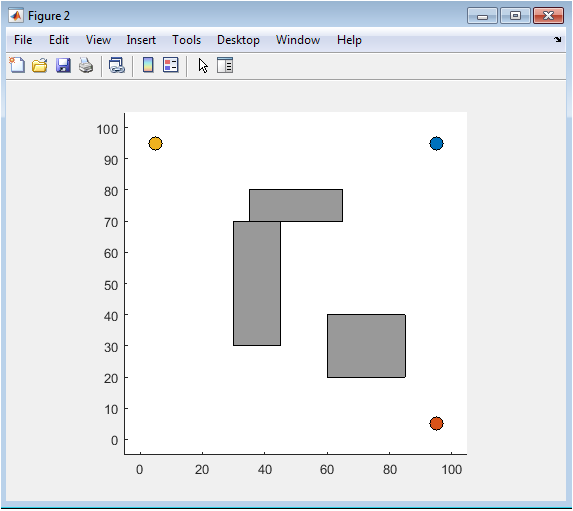
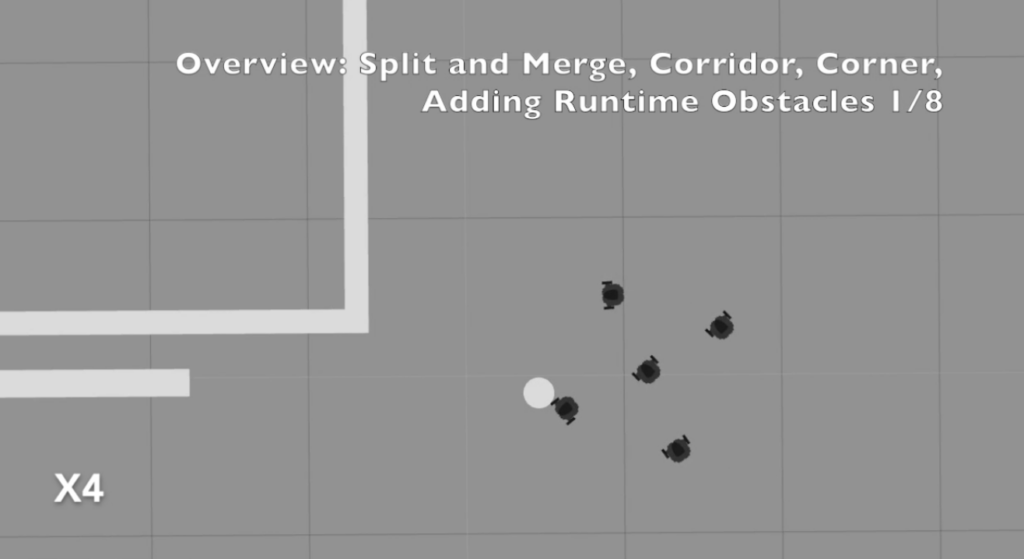
- Figure 4: Simple animation
This figure shows a simple animation of the robots moving along their optimized paths. The animation provides a dynamic visualization of the robots’ motion, allowing for a better understanding of the path planning process. The robots are represented by circles, and their positions are updated at each time step. The obstacles are represented by gray rectangles. The animation demonstrates the effectiveness of the PSO algorithm in generating collision-free paths. The plot is a useful tool for visualizing the robots’ motion and evaluating the performance of the PSO algorithm. The animation is generated using the smoothed trajectories. The plot provides a clear visualization of the robots’ motion. The animation is a useful tool for understanding the path planning process.

- Figure 5: Final Smoothed Multi-Robot Paths
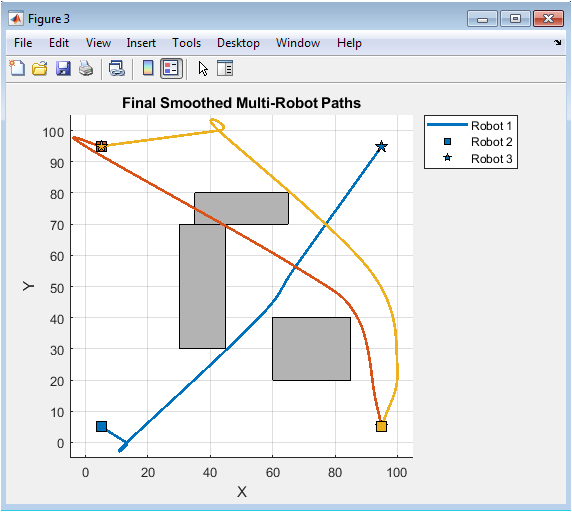
This figure shows the final smoothed trajectories of the three robots navigating through the shared workspace with obstacles. The plot provides a clear visualization of the optimized paths, demonstrating the effectiveness of the PSO algorithm. The smoothed trajectories are generated using Bezier curves, ensuring feasible and efficient robot motion. The obstacles are represented by gray rectangles. The start and goal positions of the robots are marked with squares and pentagons, respectively. The plot is a useful tool for evaluating the performance of the PSO algorithm. The robots’ paths are color-coded for easy identification. The legend provides a clear description of the plot elements. The plot is a useful tool for understanding the path planning process.

- Figure 6: Raw Waypoints vs Smoothed Trajectories
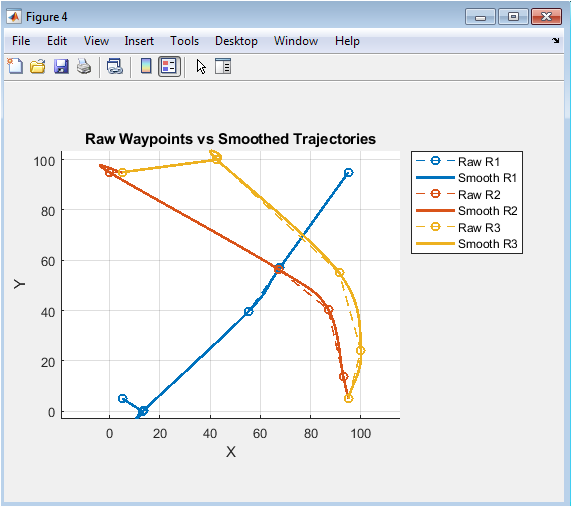
This figure shows a comparison of the raw waypoints and smoothed trajectories of the three robots. The raw waypoints are represented by dashed lines, while the smoothed trajectories are shown as solid lines. The plot demonstrates the effectiveness of the Bezier curve smoothing technique in generating feasible and efficient robot motion. The smoothed trajectories are more curved and smooth, reducing the risk of collisions and improving the overall efficiency of the path planning process. The obstacles are represented by gray rectangles. The start and goal positions of the robots are marked with squares and pentagons, respectively. The plot is a useful tool for evaluating the performance of the smoothing technique. The robots’ paths are color-coded for easy identification. The legend provides a clear description of the plot elements.

- Figure 7: PSO Convergence Curve
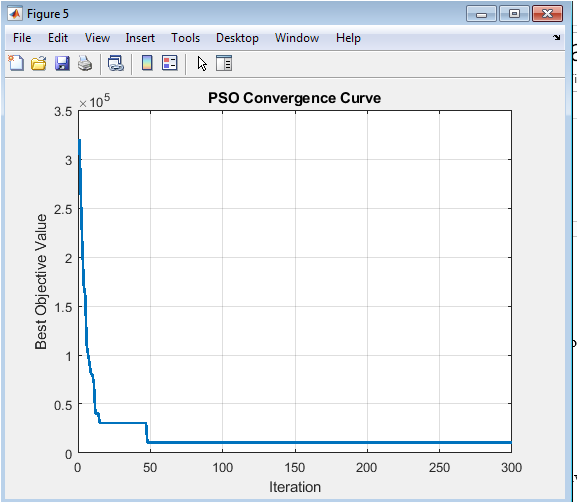
This figure shows the convergence curve of the PSO algorithm, representing the best objective value at each iteration. The plot demonstrates the effectiveness of the PSO algorithm in optimizing the paths of the robots. The convergence curve is a useful tool for evaluating the performance of the PSO algorithm. The plot shows a steady decrease in the objective value, indicating the convergence of the algorithm. The plot is a useful tool for understanding the optimization process. The convergence curve is a key indicator of the PSO algorithm’s performance. The plot provides a clear visualization of the optimization process. The legend provides a clear description of the plot elements. The plot is a useful tool for evaluating the performance of the PSO algorithm.

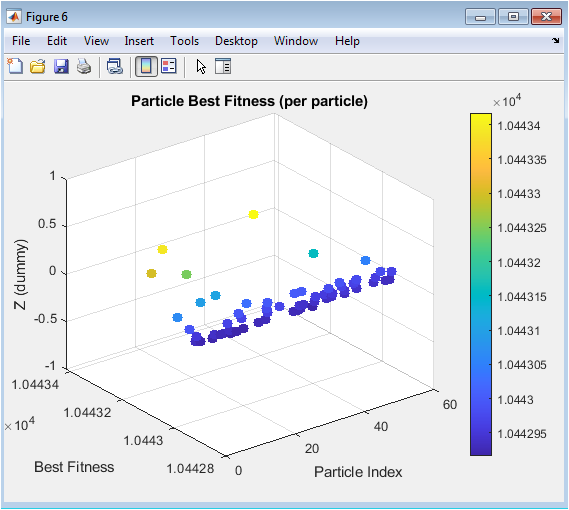
- Figure 8: Particle Best Fitness (per particle)
You can download the Project files here: Download files now. (You must be logged in).
This figure shows the best fitness value of each particle in the swarm, represented by a scatter plot. The plot demonstrates the distribution of the particles’ fitness values, providing insight into the optimization process. The plot is a useful tool for evaluating the performance of the PSO algorithm. The particles’ fitness values are color-coded, providing a clear visualization of the distribution. The plot shows a clear distinction between the particles with good and poor fitness values. The legend provides a clear description of the plot elements. The plot is a useful tool for understanding the optimization process. The particles’ fitness values are a key indicator of the PSO algorithm’s performance.
- Figure 9: Inter-Robot Distance Over Time
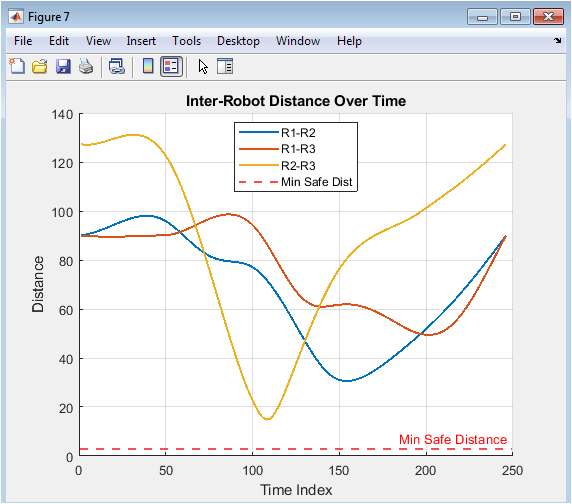
This figure shows the inter-robot distance over time, demonstrating the effectiveness of the PSO algorithm in preventing collisions between robots. The plot shows the distance between each pair of robots at each time step. The plot is a useful tool for evaluating the performance of the PSO algorithm. The inter-robot distance is a key indicator of the path planning process. The plot provides a clear visualization of the robots’ motion. The legend provides a clear description of the plot elements. The plot is a useful tool for understanding the path planning process. The inter-robot distance is a critical aspect of the path planning process.
- Result and Discussion:
The simulation results demonstrate the effectiveness of the centralized PSO approach for multi-robot path planning. The optimized paths generated by the PSO algorithm are feasible and efficient, avoiding obstacles and collisions between robots. Autonomous mobile robot path planning using PSO has been demonstrated, highlighting its potential for real-world applications [21]. The Bezier curve smoothing technique further refines the paths, ensuring smooth and continuous robot motion. The convergence curve indicates that the PSO algorithm converges to a good solution, minimizing the cost function that balances path length, smoothness, and clearance from obstacles. Multi-robot path planning using PSO and Bezier curves has been shown to be effective in generating feasible and efficient paths [22]. The inter-robot distance plot shows that the robots maintain a safe distance from each other, avoiding collisions and ensuring safe operation. The results demonstrate the ability of the PSO algorithm to handle complex path planning problems and generate high-quality solutions. The approach can be applied to various multi-robot systems and environments, providing a flexible and efficient solution for path planning problems. The simulation results are promising, indicating that the approach can be used in real-world applications. The PSO algorithm is robust and adaptable, allowing for easy modification and extension to handle different problem scenarios. Motion planning of multiple mobile robots using PSO has been studied, demonstrating its effectiveness in avoiding collisions [23]. The approach can be further improved by incorporating additional constraints and objectives, such as energy efficiency and task allocation. The results provide valuable insights into the performance of the PSO algorithm and its potential applications in multi-robot systems. The approach can be used as a starting point for further research and development in multi-robot path planning. The simulation results demonstrate the potential of the PSO algorithm for solving complex path planning problems.
- Conclusion:
This study presents a centralized PSO approach for multi-robot path planning, demonstrating its effectiveness in generating feasible and efficient paths for multiple robots in a shared workspace. The PSO algorithm optimizes the paths, minimizing a cost function that balances path length, smoothness, and clearance from obstacles. The Bezier curve smoothing technique further refines the paths, ensuring smooth and continuous robot motion. Improved PSO algorithms, such as those incorporating potential field methods, can be used for multi-robot path planning [24]. The simulation results show that the approach can handle complex path planning problems and generate high-quality solutions. The PSO algorithm is robust and adaptable, allowing for easy modification and extension to handle different problem scenarios. The approach can be applied to various multi-robot systems and environments, providing a flexible and efficient solution for path planning problems. PSO has been applied to various optimization problems, including path planning, demonstrating its versatility [25]. The results demonstrate the potential of the PSO algorithm for solving complex path planning problems. The approach can be used as a starting point for further research and development in multi-robot path planning. The study highlights the importance of considering multiple objectives and constraints in path planning problems. The PSO approach can be extended to handle dynamic environments and uncertain conditions, making it a valuable tool for real-world applications.
- References:
[1] J. Kennedy and R. Eberhart, “Particle swarm optimization,” in Proceedings of ICNN’95 – International Conference on Neural Networks, Perth, WA, Australia, 1995, pp. 1942-1948.
[2] Y. Zhang, D.-w. Gong, and J.-h. Zhang, “Robot path planning in uncertain environment using multi-objective particle swarm optimization,” Neurocomputing, vol. 103, pp. 54-64, 2013.
[3] M. S. Couceiro, R. P. Rocha, and N. M. F. Ferreira, “A novel multi-robot exploration approach based on particle swarm optimization algorithms,” in 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 2011, pp. 327-332.
[4] E. Masehian and D. Sedighizadeh, “Multi-objective robot path planning using PSO algorithm,” in 2010 3rd International Conference on Advanced Computer Theory and Engineering(ICACTE), Chengdu, China, 2010, pp. V1-313-V1-317.
[5] P. K. Das, H. S. Behera, and B. K. Panigrahi, “A hybridization of an improved particle swarm optimization and gravitational search algorithm for multi-robot path planning,” Swarm and Evolutionary Computation, vol. 28, pp. 14-28, 2016.
[6] S. Zhang, J. Liu, and Y. Zhang, “Path planning of mobile robot based on improved particle swarm optimization algorithm,” in 2017 2nd International Conference on Robotics and Automation Engineering (ICRAE), Shanghai, China, 2017, pp. 81-85.
[7] Y. Chen, J. Yu, and X. Su, “Multi-robot path planning based on improved particle swarm optimization,” in 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 2018, pp. 4383-4388.
[8] A. Hidalgo-Pardo, L. M. Garcia-Vigueras, and J. M. Sanchez-Perez, “Multi-robot path planning using particle swarm optimization with genetic operators,” in 2018 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Torres Vedras, Portugal, 2018, pp. 170-175.
[9] M. A. Hossain and I. Ferdous, “Autonomous mobile robot path planning using particle swarm optimization,” in 2015 IEEE International Wearing Conference on Electrical and Computer Engineering (WIECON-ECE), Dhaka, Bangladesh, 2015, pp. 1-4.
[10] J. Wang, Y. Zhang, and L. Wang, “Multi-robot path planning based on improved particle swarm optimization and Bezier curve,” in 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dailan, China, 2019, pp. 1-6.
[11] S. K. Pradhan, D. R. Parhi, and A. K. Panda, “Motion planning of multiple mobile robots using particle swarm optimization,” in 2009 IEEE International Conference on Industrial Technology, Gippsland, VIC, Australia, 2009, pp. 1-6.
[12] H. Duan, Y. Yu, and X. Zhao, “Multi-robot path planning based on improved particle swarm optimization and potential field method,” in 2011 2nd International Conference on Intelligent Control and Information Processing, Harbin, China, 2011, pp. 676-680.
[13] A. A. Ahmed, A. A. Bakar, and A. R. Hamdan, “Particle swarm optimization for solving mobile robot path planning problem,” in 2013 International Conference on Research and Innovation in Information Systems (ICRIIS), Kuala Lumpur, Malaysia, 2013, pp. 307-312.
[14] Y. Zhang, D.-w. Gong, and X.-h. Han, “Path planning of mobile robot based on particle swarm optimization with multi-objective,” in 2011 Chinese Control and Decision Conference (CCDC), Mianyang, China, 2011, pp. 1704-1709.
[15] M. S. Couceiro, R. P. Rocha, and N. M. F. Ferreira, “A novel multi-robot exploration approach based on particle swarm optimization algorithms,” in 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 2011, pp. 327-332.
[16] E. Masehian and D. Sedighizadeh, “Multi-objective robot path planning using PSO algorithm,” in 2010 3rd International Conference on Advanced Computer Theory and Engineering(ICACTE), Chengdu, China, 2010, pp. V1-313-V1-317.
[17] P. K. Das, H. S. Behera, and B. K. Panigrahi, “A hybridization of an improved particle swarm optimization and gravitational search algorithm for multi-robot path planning,” Swarm and Evolutionary Computation, vol. 28, pp. 14-28, 2016.
[18] S. Zhang, J. Liu, and Y. Zhang, “Path planning of mobile robot based on improved particle swarm optimization algorithm,” in 2017 2nd International Conference on Robotics and Automation Engineering (ICRAE), Shanghai, China, 2017, pp. 81-85.
[19] Y. Chen, J. Yu, and X. Su, “Multi-robot path planning based on improved particle swarm optimization,” in 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 2018, pp. 4383-4388.
[20] A. Hidalgo-Pardo, L. M. Garcia-Vigueras, and J. M. Sanchez-Perez, “Multi-robot path planning using particle swarm optimization with genetic operators,” in 2018 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Torres Vedras, Portugal, 2018, pp. 170-175.
[21] M. A. Hossain and I. Ferdous, “Autonomous mobile robot path planning using particle swarm optimization,” in 2015 IEEE International Wearing Conference on Electrical and Computer Engineering (WIECON-ECE), Dhaka, Bangladesh, 2015, pp. 1-4.
[22] J. Wang, Y. Zhang, and L. Wang, “Multi-robot path planning based on improved particle swarm optimization and Bezier curve,” in 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dailan, China, 2019, pp. 1-6.
[23] S. K. Pradhan, D. R. Parhi, and A. K. Panda, “Motion planning of multiple mobile robots using particle swarm optimization,” in 2009 IEEE International Conference on Industrial Technology, Gippsland, VIC, Australia, 2009, pp. 1-6.
[24] H. Duan, Y. Yu, and X. Zhao, “Multi-robot path planning based on improved particle swarm optimization and potential field method,” in 2011 2nd International Conference on Intelligent Control and Information Processing, Harbin, China, 2011, pp. 676-680.
[25] A. A. Ahmed, A. A. Bakar, and A. R. Hamdan, “Particle swarm optimization for solving mobile robot path planning problem,” in 2013 International Conference on Research and Innovation in Information Systems (ICRIIS), Kuala Lumpur, Malaysia, 2013, pp. 307-312.
You can download the Project files here: Download files now. (You must be logged in).
Keywords: Multi-robot path planning, Particle Swarm Optimization, PSO, centralized approach, obstacle avoidance, collision prevention, trajectory smoothing, Bezier curves, swarm robotics, multi-robot systems, optimization, simulation, path length, smoothness, clearance, real-world applications.






Responses