Modeling and Simulation of Vehicle Power Network in Simulink MATLAB
Modeling and Simulation of Vehicle Power Network in Simulink MATLAB
Modeling and Simulation of Vehicle Power Network in Simulink MATLAB
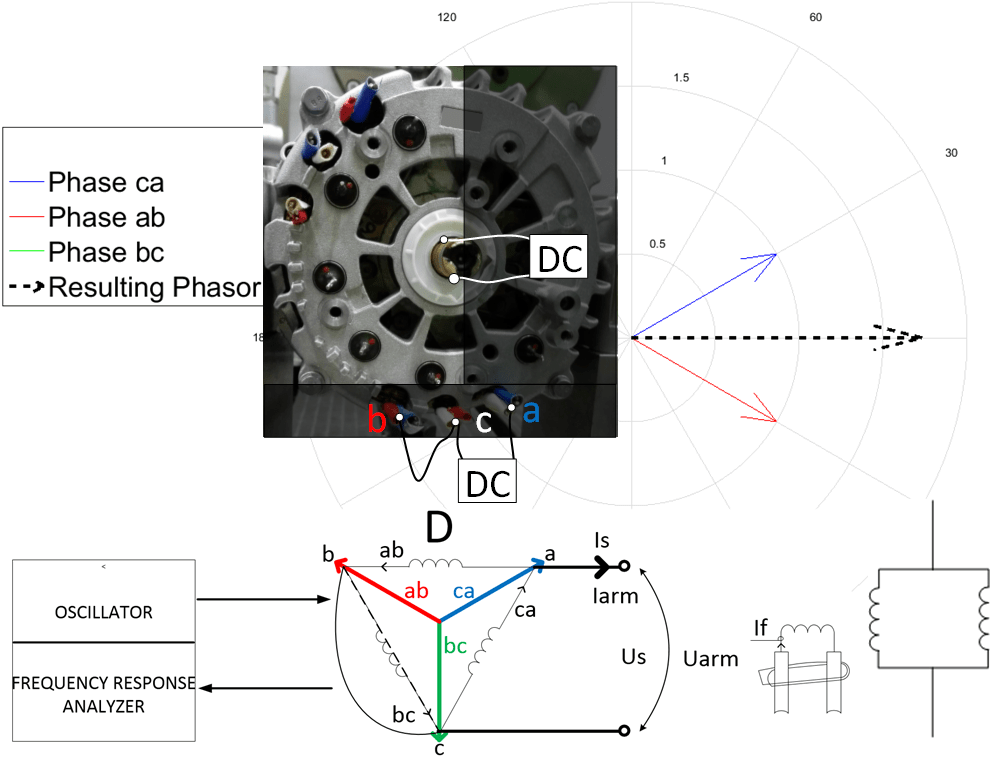
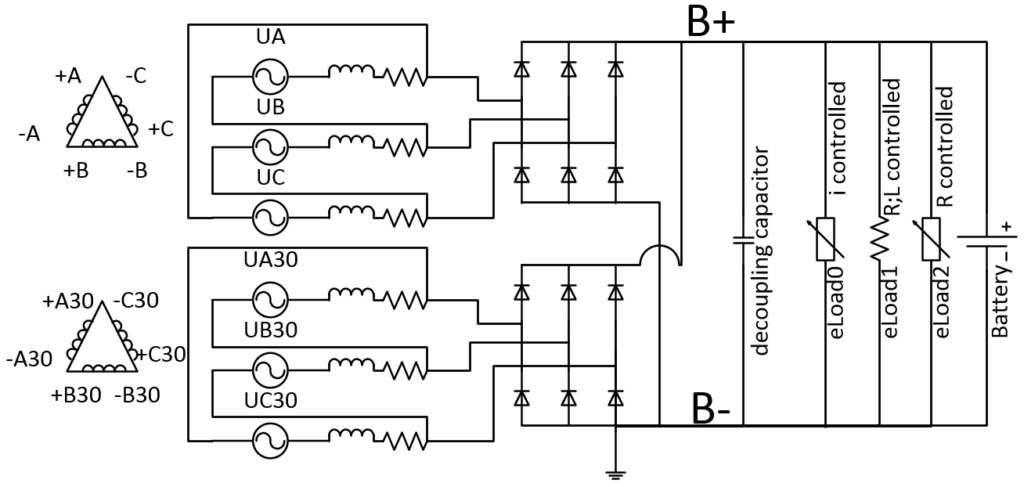
The current publication introduces an approach for obtaining parameters of a six phase double delta salient-pole synchronous machine, based on the standstill frequency response test. The described approach was verified by measurements on a automotive claw-pole alternator, done in a laboratory on a test bench.





Please confirm you want to block this member.
You will no longer be able to:
Please allow a few minutes for this process to complete.