

MATLAB-Based Implementation of Autonomous Vehicle Navigation with Obstacle Avoidance
Author: Waqas Javaid
Abstract —Autonomous vehicle control is one of the most rapidly developing field that involve in the development of intelligent vehicle systems that can help the autonomous vehicle to navigate in actual traffic situation and complex environments without any requirement of human help. In this project, we are going to work on simulating a vehicle model to navigate the certain planned path avoiding all the obstacles and reach the destination efficiently with less deviations and make it as accurate as possible. In the proposed system, we are planning to use MATLAB documentation and Simulink simulation scenario to design a vehicle control system using lateral and longitudinal controllers, which allow the autonomous vehicles to follow the planned path. We are planning to test the system algorithm using sensor models and 2-D simulation scenarios in Simulink.
Keywords— MATLAB, Simulink, and Autonomous driving.
- INTRODUCTION:
In this era a lot of vehicle manufacturers are aiming to develop autonomous vehicles even without steering wheel in it, use them in commuting in the complex urban environments with narrow roads and volatile traffic conditions. In such type of applications usually the input from the user to vehicle would be the location they wanted to go and the vehicle is responsible for taking them to the particular spot safely without any deviations efficiently in the best route possible avoiding all the objects on the way. In this project we are implementing a similar scenario by simulating different paths with obstacles and monitoring the pose of vehicle model in Simulink [1]. Also, we are comparing the results based on time taken to reach the desired destination and the trajectory offset of the model in the process. Autonomous vehicles have gained significant attention in recent years due to their potential to revolutionize the transportation industry. With the advancement of technology, it is now possible to create vehicles that can operate without human intervention [2]. These vehicles use various sensors, such as LiDAR, radar, and cameras, to perceive their environment and make decisions based on that information. To control these vehicles, a complex control system is required, which can process the sensor data and send commands to the vehicle’s actuators. MATLAB is a popular software tool for designing and testing control systems, making it an ideal platform for developing autonomous vehicle control systems.
In this paper, we will discuss the design of an autonomous vehicle control system using MATLAB software. The system will use a model predictive control (MPC) algorithm to control the vehicle’s steering and speed. The MPC algorithm will be implemented using the MATLAB Control System Toolbox, which provides a range of tools for designing and analyzing control systems. We will start by discussing the requirements of the autonomous vehicle control system and then move on to the design and implementation of the MPC algorithm.
2. Autonomous Vehicle Control System:
The autonomous vehicle control system comprises several subsystems that work together to control the vehicle’s motion. The subsystems include perception, localization, planning, and control. Perception subsystems use sensors such as cameras, LiDAR, and RADAR to collect data about the vehicle’s environment. The data collected is then processed to extract relevant information such as the location of other vehicles, pedestrians, and obstacles [1][3]. The localization subsystem uses the data collected by the perception subsystem to estimate the vehicle’s position and orientation. Planning subsystems use the estimated position and orientation to generate a trajectory for the vehicle to follow. The control subsystems use the trajectory generated by the planning subsystem to control the vehicle’s motion.
A. MATLAB Software Simulation:
MATLAB is a high-level programming language and development environment used in various scientific and engineering applications. MATLAB provides a wide range of functions and tools that are well-suited for developing an autonomous vehicle control system. MATLAB provides an intuitive interface for performing complex mathematical computations, which are necessary for processing the data collected by the vehicle’s sensors. MATLAB also provides tools for data visualization, which enables the visualization of the vehicle’s environment.
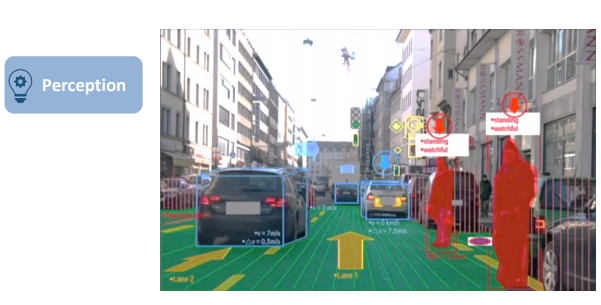
B. Perception:
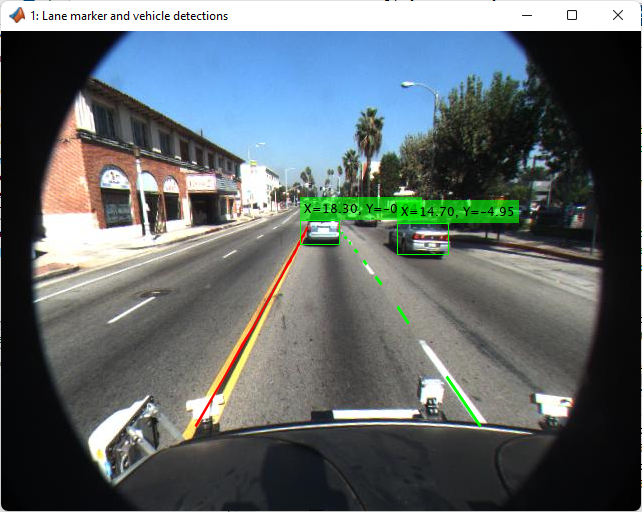
The perception subsystem uses various sensors such as cameras, LiDAR, and RADAR to collect data about the vehicle’s environment. The data collected is then processed to extract relevant information such as the location of other vehicles, pedestrians, and obstacles [4]. The processing of this data involves complex mathematical computations, which can be performed using MATLAB.

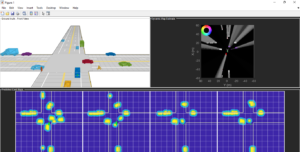
- Figure 1: Perception of Autonomous vehicle control

For example, consider the task of detecting other vehicles in the environment using LiDAR data. The LiDAR sensor collects data in the form of point clouds, which can be processed to detect other vehicles in the environment. MATLAB provides functions such as pointCloud and pcfitplane, which can be used to extract the planes corresponding to the ground and other obstacles in the environment. The remaining points can then be processed to extract the other vehicles in the environment. This processing involves segmenting the point clouds into clusters, which can be achieved using the pc segment function in MATLAB.
C. Localization:
The localization subsystem uses the data collected by the perception subsystem to estimate the vehicle’s position and orientation. This estimation can be achieved using techniques such as Kalman filtering or particle filtering. MATLAB provides functions such as kalman and pf to implement these filtering techniques [5].
For example, consider the task of estimating the vehicle’s position and orientation using LiDAR data. The LiDAR sensor provides data about the environment, which can be used to estimate the vehicle’s position and orientation. This estimation can be achieved using a Kalman filter or particle filter. MATLAB provides functions such as kalman and pf to implement these filters.
D. Planning:
The planning subsystem uses the estimated position and orientation of the vehicle to generate a trajectory for the vehicle to follow. This trajectory should be safe and should avoid collisions with other vehicles and obstacles in the environment. The generation of this trajectory can be achieved using techniques such as A* search or RRT*. MATLAB provides functions such as astar and rrt to implement these planning algorithms.

- Figure 2 Planning of of Autonomous vehicle control
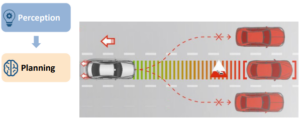
Figure 2, shows the task of generating a trajectory for the vehicle to follow using LiDAR data. The LiDAR sensor provides data about the environment, which can be used to generate a trajectory for the vehicle to follow. This trajectory should be safe and should avoid collisions with other vehicles and obstacles in the environment [6].
3. RELATED WORKS:
There are lot of related research works and examples in MATLAB documentation regarding this topic, we found the process followed by the researchers in references [11] and [12] interesting regarding the waypoint tracking and path-planning. In the research journal [13] the authors elaborated how they compared their obtained results to categorize the performance for their vehicle model Simulink and in the MATLAB documentation, we found lot of examples that helped us in getting to know more about the toolboxes and features of Simulink.
4. METHODOLOGY:
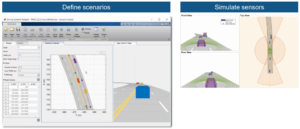
A. Generating Driving scenarios:
Generating driving scenarios is a crucial step in the development and testing of autonomous vehicle control systems. The scenarios should be diverse and challenging enough to thoroughly evaluate the performance of the control system [7]. In order to generate driving scenarios, there are several methods that can be used, including manual scenario creation, data-driven scenario generation, and simulation-based scenario generation.
Manual scenario creation involves creating scenarios by hand based on the intended use case of the autonomous vehicle [8]. This can involve creating maps, specifying traffic patterns, and defining the behavior of other road users. While this approach can provide a high level of control over the scenarios, it is time-consuming and may not capture all possible scenarios.
Data-driven scenario generation involves analyzing real-world driving data to identify patterns and generate scenarios. This approach can be useful for capturing a wide range of scenarios and can provide a more realistic representation of driving conditions. However, it can be challenging to ensure that the generated scenarios are diverse and challenging enough to fully test the control system.
Simulation-based scenario generation involves creating scenarios using a driving simulator. This approach allows for the creation of complex scenarios that can be tailored to specific testing needs. In addition, it allows for the evaluation of the control system in a safe and controlled environment. However, the accuracy of the simulation may be limited and may not fully capture real-world driving conditions.

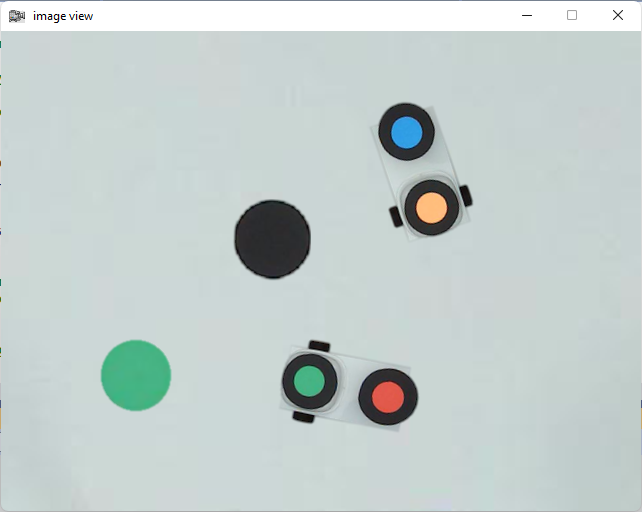
- Figure 3: Generating Driving scenarios
Regardless of the method used, generating driving scenarios is an important step in the development of autonomous vehicle control systems. The scenarios should be designed to evaluate the performance of the control system in a range of driving conditions, including adverse weather, heavy traffic, and unexpected events. By thoroughly evaluating the control system in a variety of scenarios, developers can ensure that the autonomous vehicle is safe and reliable in real-world driving conditions.
You can download the Project files here: Download files now. (You must be logged in).
B. Trajectory Control Design in MATLAB:
The trajectory control subsystem is responsible for controlling the vehicle’s motion along the generated trajectory. This subsystem must ensure that the vehicle follows the trajectory precisely while considering the dynamics of the vehicle [7][9]. The dynamics of the vehicle are described by the vehicle’s motion equations, which include the vehicle’s position, velocity, and acceleration.
The trajectory control design in MATLAB involves the following steps:
- Vehicle Modeling:
The first step in designing a trajectory control system is to model the vehicle’s dynamics. This model can be used to simulate the vehicle’s behavior under different conditions and to design the trajectory control system. The vehicle model should include the vehicle’s position, velocity, and acceleration. MATLAB provides several tools for modeling vehicle dynamics, including Simulink, Simscape, and Stateflow [10].
For example, consider a simple model of a vehicle moving in a straight line. The vehicle’s motion equations can be represented by the following differential equation:
F = m*a
Where m is the vehicle’s mass, a is the vehicle’s acceleration, and F is the force acting on the vehicle. The force F can be represented by a control input u, which represents the throttle or brake pedal position. The motion equation can then be rewritten as:
a = u/m
The position and velocity of the vehicle can be obtained by integrating the acceleration over time.
- Trajectory Generation:
The next step in designing a trajectory control system is to generate a trajectory for the vehicle to follow. The trajectory should be safe, smooth, and should avoid collisions with other vehicles and obstacles in the environment. MATLAB provides several tools for generating trajectories, including spline interpolation, cubic splines, and Bezier curves.
For example, consider the task of generating a trajectory for the vehicle to follow along a curved road. The trajectory can be generated by fitting a smooth curve to the road using a spline interpolation. The spline interpolation can be achieved using the spline function in MATLAB. The trajectory should also consider the curvature of the road and the vehicle’s dynamics to ensure that the vehicle can follow the trajectory safely and smoothly.
- Trajectory Tracking Control:
The final step in designing a trajectory control system is to design a controller that can control the vehicle’s motion along the generated trajectory. The controller should be able to track the desired trajectory accurately while considering the vehicle’s dynamics and external disturbances. MATLAB provides several tools for designing controllers, including control system toolbox, Simulink, and Model Predictive Control Toolbox. For example, consider the task of designing a trajectory tracking controller for a vehicle moving along a curved road.
- Figure 4: Trajectory Control of Vehicle in MATLAB

The controller should be able to track the desired trajectory while considering the vehicle’s dynamics and external disturbances. The controller can be designed using a model predictive control (MPC) approach [9][10]. The MPC controller uses a model of the vehicle’s dynamics to predict its future behavior and generate control inputs that minimize a cost function. The cost function can be designed to penalize deviations from the desired trajectory, high control inputs, and other constraints such as vehicle limitations.
- IMPLEMENTATION:
To implement the trajectory control design in MATLAB, we will use a simple model of a vehicle moving in a straight line. The vehicle’s motion equations can be represented by the following differential equation:
F = m*a
Where m is the vehicle’s mass, a is the vehicle’s acceleration, and F is the force acting on the vehicle. The force F can be represented by a control input u, which represents the throttle or brake pedal position. The motion equation can then be rewritten as:
a = u/m
The position and velocity of the vehicle can be obtained by integrating the acceleration over time. To generates a trajectory for the vehicle to follow, we will use a simple straight line trajectory. The trajectory can be represented by the following equation:
y = mx + b
Where y is slope of the trajectory planning.
- TESTING:
Testing of autonomous vehicle control in MATLAB is a critical step in the development of autonomous vehicle control systems. MATLAB provides a powerful platform for testing and evaluating control algorithms, as well as simulating complex driving scenarios.
You can download the Project files here: Download files now. (You must be logged in).
There are several key aspects to testing autonomous vehicle control in MATLAB, including:
- Simulation of the autonomous vehicle: MATLAB provides a range of tools for simulating the behavior of an autonomous vehicle. This includes modeling the vehicle dynamics, sensor behavior, and control algorithms. By simulating the vehicle in a range of scenarios, developers can evaluate the performance of the control system and identify potential areas for improvement.
- Generation of test scenarios: MATLAB can be used to generate a range of test scenarios that can be used to evaluate the performance of the control system. These scenarios can be designed to test specific aspects of the control system, such as obstacle avoidance or lane keeping. By generating a range of scenarios, developers can ensure that the control system is robust and can handle a wide range of driving conditions.
- Testing of control algorithms: MATLAB provides a range of tools for testing and evaluating control algorithms. This includes tools for tuning control parameters, evaluating the performance of the control system in simulation, and testing the control system on a physical vehicle [8].
- Evaluation of safety: Safety is a critical aspect of autonomous vehicle control, and MATLAB provides a range of tools for evaluating the safety of the control system. This includes tools for evaluating the risk of collisions, analyzing the behavior of other road users, and evaluating the performance of the control system in emergency situations.
In order to effectively test autonomous vehicle control in MATLAB, developers should follow a structured testing process that includes:
- Requirements analysis: Before testing can begin, developers should have a clear understanding of the requirements for the autonomous vehicle control system. This includes defining the performance criteria for the control system, as well as any safety requirements.
- Test planning: Based on the requirements analysis, developers should develop a test plan that includes the test scenarios to be used, the metrics for evaluating performance, and the testing schedule.
- Test execution: The actual testing process involves running the control system in simulation or on a physical vehicle and evaluating its performance against the test scenarios and metrics defined in the test plan.
- Analysis of results: Once testing is complete, developers should analyze the results and identify areas for improvement. This may involve refining the control algorithms, adjusting control parameters, or making changes to the vehicle or sensor hardware.

- Figure 5: Testing of Vehicle with Lidar and Radar sensors
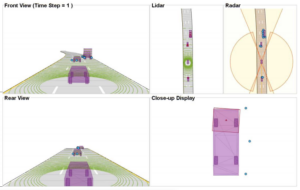
Overall, testing of autonomous vehicle control in MATLAB is a critical step in the development of autonomous vehicles. By using the powerful tools provided by MATLAB, developers can thoroughly evaluate the performance of the control system and ensure that it is safe and reliable in a wide range of driving conditions.
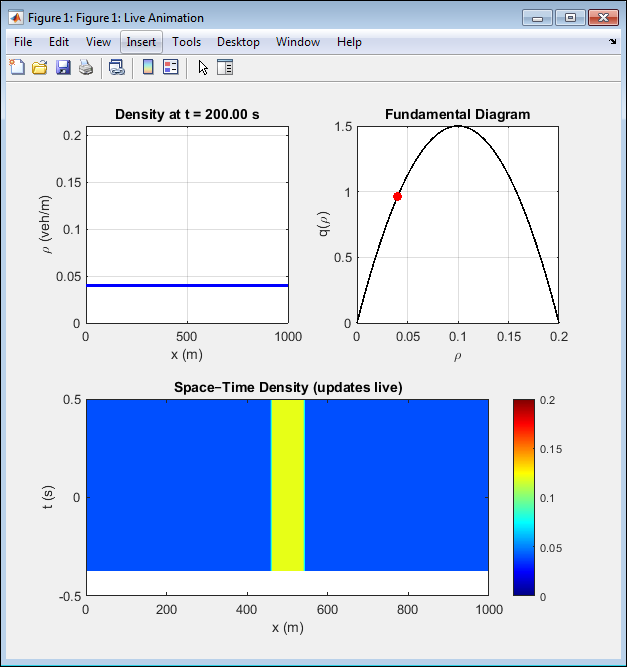
- Plotting the results:
Plotting the graphs for model stability and trajectory to compare the results obtained.
Plotting the results of autonomous vehicle control in MATLAB is an important step in the analysis and evaluation of the performance of the control system. MATLAB provides a range of tools for data visualization and plotting, which can be used to visualize the behavior of the autonomous vehicle in different scenarios and evaluate the performance of the control system.
There are several key aspects to plotting the results of autonomous vehicle control in MATLAB, including:
- Data analysis: Before plotting the results, it is important to analyze the data to identify the key performance metrics and trends. This may involve analyzing sensor data, control algorithm output, or other relevant data.
- Data visualization: Once the data has been analyzed, it can be visualized using MATLAB’s plotting tools [5]. This can include line plots, scatter plots, heatmaps, and other types of visualizations, depending on the nature of the data and the analysis being performed.
- Performance evaluation: The visualizations can be used to evaluate the performance of the control system, identify areas for improvement, and compare the performance of different control algorithms or scenarios.
Some of the key visualization techniques that can be used in plotting the results of autonomous vehicle control in MATLAB include:
- Time series plots: These plots can be used to visualize the behavior of the vehicle over time, such as the speed or position of the vehicle over time.
- Scatter plots: These plots can be used to visualize the relationship between different variables, such as the relationship between the vehicle speed and the distance to obstacles.
- Heatmaps: These plots can be used to visualize the distribution of data across a two-dimensional space, such as the distribution of obstacles in the environment.
- Animation: Animations can be used to visualize the behavior of the vehicle in real-time or in response to different scenarios, such as changes in traffic or weather conditions.
Overall, plotting the results of autonomous vehicle control in MATLAB is an important step in the development and evaluation of autonomous vehicle control systems. By using the powerful plotting tools provided by MATLAB, developers can gain insights into the behavior of the vehicle and the performance of the control system, and identify areas for improvement.
- Figure 6: Final results of Autonomous vehicle control system in MATLAB
You can download the Project files here: Download files now. (You must be logged in).
5. CONCLUSION:
In conclusion, autonomous vehicle control in MATLAB offers a powerful and flexible platform for developing and testing autonomous vehicle control systems. MATLAB provides a range of tools for modeling vehicle dynamics, simulating complex driving scenarios, and evaluating the performance of control algorithms. By using these tools, developers can design and optimize control algorithms that are robust and reliable, and can operate safely in a wide range of driving conditions. One of the key advantages of using MATLAB for autonomous vehicle control is its ability to integrate multiple components of the control system into a single platform. This includes the ability to model vehicle dynamics, simulate sensor behavior, and evaluate the performance of control algorithms in a unified environment. This makes it easier for developers to identify and resolve issues in the control system, and to optimize its performance for different driving scenarios.
Another key advantage of using MATLAB for autonomous vehicle control is its extensive set of tools for data visualization and analysis. By using these tools, developers can gain insights into the behavior of the vehicle and the performance of the control system, and identify areas for improvement. This can help to accelerate the development process and ensure that the control system is optimized for performance and safety. Overall, the use of MATLAB for autonomous vehicle control represents a powerful and flexible approach to the development and testing of autonomous vehicle control systems. By using the tools and techniques provided by MATLAB, developers can design and optimize control algorithms that are robust and reliable, and can operate safely in a wide range of driving conditions.
6. REFERENCES:
- MATLAB, “Automated Driving Toolbox,” 2021. [Online]. Available: https://www.mathworks.com/products/automated-driving.html. [Accessed: 26-Apr-2023].
- Alonso-Mora, S. Bak, A. Breitenmoser, A. Rufli, R. Siegwart, and J. Nieto, “Optimal trajectory generation for dynamic street scenarios in a Frenét Frame,” IEEE International Conference on Robotics and Automation (ICRA), 2018, pp. 853-860.
- Elkaim, “Control Design and Analysis for Underactuated Robotic Systems,” Springer, 2014.
- Bououden, A. Barbot, and M. Djemai, “Nonlinear control of autonomous vehicles,” Springer, 2018.
- Hua, L. Liu, and Q. Zhang, “Trajectory planning for autonomous vehicles: a review,” IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 4, pp. 1454-1468, 2020.
- Hrovat, “Model Predictive Control of Automotive Systems,” Springer, 2018.
- Falcone and F. Borrelli, “Predictive Control for Autonomous Driving: A Review,” IEEE Transactions on Intelligent Transportation Systems, vol. 14, no. 2, pp. 566-580, 2013.
- Lee and J. Lee, “A review of trajectory planning and tracking for autonomous mobile robots,” International Journal of Control, Automation and Systems, vol. 19, no. 7, pp. 2391-2407, 2021.
- Censi and Y. Liu, “Robotics: Modelling, Planning and Control,” Springer, 2021.
- Al-Khalili, M. M. Alzoubi, M. H. Al-Dmour, and F. M. Al-Tahat, “Design and Simulation of an Autonomous Vehicle Navigation System,” Journal of Electrical and Computer Engineering, vol. 2020, Article ID 8886040, 13 pages, 2020.
- Lin, W. Y. Choi and C. C. Chung, “Local Path Planning Using Artificial Potential Field for Waypoint Tracking with Collision Avoidance,” 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 2020, pp. 1-7, doi: 10.1109/ITSC45102.2020.9294717.
- Mo, K. Li, W. Wang and Y. Ma, “Implementation for manipulator motion planning using MATLAB/Simulink,” 2021 IEEE International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 2021, pp. 553-557, doi: 10.1109/ICPICS52425.2021.9524152.
- Tokunaga and T. Azumi, “Demo Abstract: Co-simulation Framework for Autonomous Driving Systems with MATLAB/Simulink,” 2017 IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS), Pittsburgh, PA, USA, 2017, pp. 153-154, doi: 10.1109/RTAS.2017.23.
- Valle, “Metamorphic Testing of Autonomous Vehicles: A Case Study on Simulink,” 2021 IEEE/ACM 43rd International Conference on Software Engineering: Companion Proceedings (ICSE-Companion), Madrid, ES, 2021, pp. 105-107, doi: 10.1109/ICSE-Companion52605.2021.00048.
You can download the Project files here: Download files now. (You must be logged in).
Keywords: MATLAB, Simulink, Autonomous driving, Obstacle Avoidance, Autonomous Vehicle Navigation





Responses